……继续阅读 » 古月 5年前 (2021-04-26) 2223浏览 0评论2253个赞
……继续阅读 » 古月 5年前 (2021-04-26) 1936浏览 0评论2641个赞
smimport_implementation Invalid file type ‘.urdf’. Can only import Physical Modeling XML files.出错 smimport (line 132)……继续阅读 » NICE 5年前 (2021-04-26) 3221浏览 0评论2255个赞
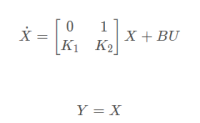
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2536浏览 0评论2607个赞
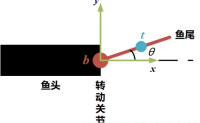
两连杆机器鱼的简单建模方法在机器鱼的建模过程中,无可避免地会遇到一个问题,那就是: 机器鱼的推进力是如何产生的呢?……继续阅读 » 西涯先生 5年前 (2021-04-26) 1527浏览 0评论1774个赞
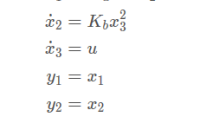
工具和参考链接由于机器人动力学模型往往都是非线性的,这里用到的工具是: MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box……继续阅读 » 西涯先生 5年前 (2021-04-26) 1719浏览 0评论2928个赞
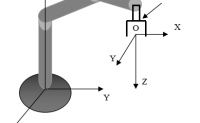
1、前记:可能用Robotics Toolbox建立的机器人模型与实际机器人在外观上存在天壤之别吧,直接将CAD软件(UG、SolidWorks、CATIA、Proe等)做好的3D模型导入MATLAB中是一个很好的选择……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2874浏览 0评论1215个赞
最近在看相关的课程,把作业做一下,还是蛮有意思的。 UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3518浏览 0评论1288个赞
文章目录……继续阅读 » 千里常安 5年前 (2021-04-26) 3062浏览 0评论2787个赞
文章目录 patch原理patch函数实例……继续阅读 » 懒小象 5年前 (2021-04-26) 2835浏览 0评论1966个赞
仿真平台:Matlab 2019b 实时编辑器(旧的版本好像没有这几个路径规划函数) 机械臂路径点跟踪有几个基本方法:三阶多项式拟合,五阶多项式拟合以及抛物线拟合(理论来自于《机器人学导论》作者:Jhon J.Craig,这里不再赘述) 原理都不难,编程难度应该也不……继续阅读 » chuchu 5年前 (2021-04-26) 1739浏览 0评论1471个赞
一、设计功能 录制音频,保存音频对录制的语音信号进行频谱分析,确定该段语音的主要频率范围;……继续阅读 » 挽风 5年前 (2021-04-26) 2196浏览 0评论1901个赞
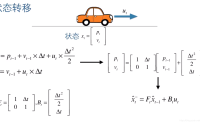
基本概念:1、状态方程: 某一时刻的状态用Xt表示,它是一个列向量,表征了当前位置Pt和当前速……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2923浏览 0评论2111个赞
在机械工程中,Denavit-Hartenberg 参数(也称为 DH 参数)是与一个特定约定相关联的四个参数,用于将参考坐标系附加到空间运动链或机器人操作臂的连杆上。“Jacques Denavit and Richard Hartenberg ……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2951浏览 0评论1542个赞
【Matlab Robotics Toolbox】robotics toolbox学习及使用记录,方便自己后面复习、改进。基于Matlab R2019b 9.5; Peter Corke的Robotics Toolbox 10.3.1……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3523浏览 0评论2211个赞
描述使用matlab求解AX=XB的问题可以正确求出X的值,我已经成功验证了至于说X具体代表什么,要结合你自己推导出的公式AX=XB之中,A、X、B分别代表什么代码main.……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1466浏览 0评论2887个赞
RRT路径规划算法地图RRT算法原理路径平滑处理总结RRT(Rapidly-Exploring Random Tree)算法是一种……继续阅读 » unique_jie 5年前 (2021-04-26) 2986浏览 0评论170个赞