本文转载自微信公众号ROBOTICS 本科阶段的机器人竞赛制作的机器人、生活中见到的扫地机器人,它们都是轮式的移动机器人;移动机器人本身运动控制比较简单,难点在于对外界的感知理解,因……继续阅读 » oCCo 5年前 (2021-04-26) 3955浏览 0评论2053个赞
本文转载自微信公众号ROBOTICS 今天我们要讲所有学习机器人学的人都需要具备的一项基本技能——坐标变换。看明白这篇文……继续阅读 » oCCo 5年前 (2021-04-26) 3465浏览 0评论1587个赞
本文转载自微信公众号ROBOTICS 上一篇(干货 | 位置角度平移旋转,“乱七八糟”的坐标变换)我们暂时抛开……继续阅读 » oCCo 5年前 (2021-04-26) 3501浏览 0评论1457个赞
本文转载自微信公众号ROBOTICS 前三篇文章(……继续阅读 » oCCo 5年前 (2021-04-26) 2136浏览 0评论520个赞
本文转载自微信公众号ROBOTICS 前言看懂本文,除了了解矩阵、向量、向量点乘、矩阵向量相乘等内容,以及看明白我们干货……继续阅读 » oCCo 5年前 (2021-04-26) 3490浏览 0评论1369个赞
本文转载自微信公众号ROBOTICS 复习 &nb……继续阅读 » oCCo 5年前 (2021-04-26) 2918浏览 0评论2365个赞
本文转载自微信公众号ROBOTICS 复习 这是我们关于雅可比矩阵的第三篇文章了。本着重要事……继续阅读 » oCCo 5年前 (2021-04-26) 3294浏览 0评论680个赞
本文转载自微信公众号ROBOTICS 在进入今天的正题之前,CC想把上一篇文章没有讲得很清楚的问题说一下——那就是,机械臂的动力学到底研究什么?(上一篇文章在此:……继续阅读 » oCCo 5年前 (2021-04-26) 2384浏览 0评论2859个赞
本文转载自微信公众号ROBOTICS 上一篇文章(点……继续阅读 » oCCo 5年前 (2021-04-26) 2318浏览 0评论1855个赞
本文转载自微信公众号ROBOTICS 各位,机械臂的动力学方程又来和大家见面了!你大概看这个方程看得都生厌了,所幸这也是入门机械臂动力学的最后一篇了——但愿这个方程已经深深地刻在你的脑海里………继续阅读 » oCCo 5年前 (2021-04-26) 2262浏览 0评论1260个赞
本文转载自微信公众号ROBOTICS 在很久很久以前的那篇……继续阅读 » oCCo 5年前 (2021-04-26) 3408浏览 0评论1951个赞
本文转载自微信公众号ROBOTICS 上一篇文章有读者留言说,希望我能整理出一个知识体系,对我自己也有点帮助。不瞒大家说,我觉得写这些东西对我自己的帮助,可能远远大于对其他人的。比如说四元数……继续阅读 » oCCo 5年前 (2021-04-26) 1765浏览 0评论1459个赞
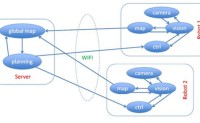
多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成、保持、变换和路径规划与避障等等都是基于图论的理论基础完成的。 图论基础 控制协同多智能体动态系统是通过通信图进行相互联系的动力学问题,通信图表明了各个节点之间的信息流。协同控……继续阅读 » RedGlass 5年前 (2021-04-26) 2255浏览 0评论1553个赞
多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成、保持、变换和路径规划与避障等等都是基于图论的理论基础完成的。 详细请参考《……继续阅读 » RedGlass 5年前 (2021-04-26) 1647浏览 0评论1526个赞
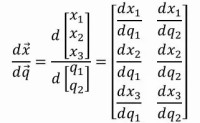
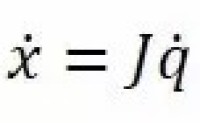
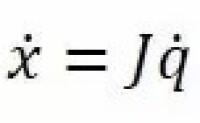
1. 前言 上一篇文章我们从几何意义的角度出发介绍了雅克比矩阵的求解方法,我觉得这种方式是最容易让人接受的一种,但是从几……继续阅读 » hitgavin 5年前 (2021-04-26) 2439浏览 0评论2431个赞
文章目录 算法求解过程代码及解析(参考Robotics Toolbox) 算法求解过程<……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3373浏览 0评论994个赞
1. 引言……继续阅读 » hitgavin 5年前 (2021-04-26) 2545浏览 0评论171个赞
1. 引言 ……继续阅读 » hitgavin 5年前 (2021-04-26) 2391浏览 0评论273个赞
1. 引言 1.……继续阅读 » hitgavin 5年前 (2021-04-26) 1834浏览 0评论1356个赞