TensorFlow处理数据常用套路 ……继续阅读 » 一三五 5年前 (2021-04-26) 2753浏览 0评论2067个赞
一、安装 语音识别安装参考文章:安装教程 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3305浏览 0评论1783个赞
上一篇文章中,写过了关于两连杆机器鱼建模的方法。实际上,有一个细节值得注意,那就是在联立(1)和(2)方程,求解鱼头加速度,这一步中,是如何联立求解的。一般有两种方式: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2893浏览 0评论266个赞
文章首发于我的个人博客http://kevinnan.org.cn ……继续阅读 » LucasNan 5年前 (2021-04-26) 1847浏览 0评论363个赞
10 膨胀与腐蚀 1 膨胀 2 腐蚀 (1)形态学操作(morphology operators)——膨胀、腐蚀 图像形态学操作——……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3092浏览 0评论801个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2517浏览 0评论136个赞
tensorflow的RNN(递归神经网络) 运行结果 ……继续阅读 » 一三五 5年前 (2021-04-26) 1692浏览 0评论2751个赞
一、前言 接上一篇博客:ros机器人编程实践(15.1)- 使用科大讯飞语音控制turtlebot导航 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2361浏览 0评论1789个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 1757浏览 0评论406个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3203浏览 0评论535个赞
前言 上一篇博客:ros机器人编程实践(15.2)- 使用科大讯飞语音控制turtlebot导航 在上一篇博客中我们已经实现了语音……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3155浏览 0评论2488个赞
tensorflow的dropout 防止过拟合 原文链接:https://github.com/MorvanZhou/Tensorflow-Tutorial 训练前自己的数据 ……继续阅读 » 一三五 5年前 (2021-04-26) 2637浏览 0评论2437个赞
首先感谢古月居提供笔者本次参与机器人云实践平台测试的机会。 通过下方简短的视频让我们直观感受该云实践平台的操作。 ……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2428浏览 0评论1897个赞
实验方法将 Robot Application 配成 e……继续阅读 » IBN_Blank 5年前 (2021-04-26) 2681浏览 0评论2122个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3032浏览 0评论2086个赞
20 霍夫圆检测 1 原理简介 2 相关API①原理简介 对于笛卡尔坐标系中圆的方程……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3075浏览 0评论1865个赞
……继续阅读 » zhangrelay 5年前 (2021-04-26) 2701浏览 0评论1610个赞
运行结果 ……继续阅读 » 一三五 5年前 (2021-04-26) 3334浏览 0评论2870个赞
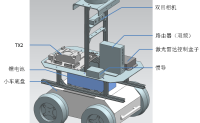
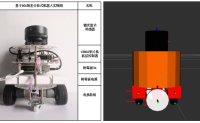
1.引言 本着为大家谋福利的心态,根据自己以往的开发经验,打算写一个从零开始制作一个可以实现地图构建和导航的ROS小车。目前某宝上面有很多现成产品,但是我个……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2048浏览 0评论1113个赞
上一篇博客我们介绍了ROS试验车的结构设计(三维模型)和部分通讯设计。上篇博客中通讯设计主要介绍了使用ROS系统进行12V10Ah和12V20Ah锂电池的通讯。 我们的目标是设计一套完整的的……继续阅读 » 一三五 5年前 (2021-04-26) 1942浏览 0评论1553个赞
前言 之前用turtlebot仿真过巡线机器人,但是turtlebot略显笨重,为了纪念下本科参加的飞思卡尔,尝试着做一套ROS的仿真SmartCar。 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2170浏览 0评论2548个赞
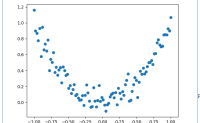
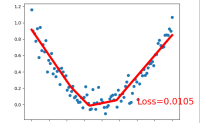
基于tensorflow的一元线性回归详细讲解 官方代码: https://github.com/MorvanZhou/Tensorflow-Tutorial/blob/master/tutoria……继续阅读 » 一三五 5年前 (2021-04-26) 2558浏览 0评论1225个赞
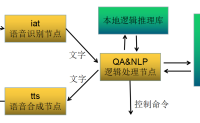
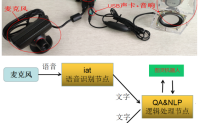
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2557浏览 0评论2483个赞
新一学年开学在即,多半年都没进过实验室的同学们要疯狂滴补“动手实战”; 推迟了几个月的全国大学生电子设计竞赛(今年是省赛)还有一个多月就开赛,不少同学都在为大学四年最重要的一个赛事冲刺; 正巧今天TI发布了今年省赛的器件清单: ……继续阅读 » 电子森林 5年前 (2021-04-26) 2905浏览 0评论1579个赞
搭建ROS小车真的难吗?不难……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3238浏览 0评论2574个赞
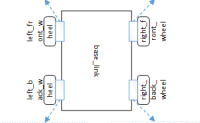
ROS小车的软件结构0……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1701浏览 0评论1449个赞
2.1 STM32电机PWM控制 我们这里提供左右两个电机PWM控制代码,在公众号:小白学移……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1563浏览 0评论590个赞
2.2 STM32电机测速(正交或者霍尔编码器) 我们这里提供左右电机测速代码,在公……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1994浏览 0评论2659个赞
也许你在学习各类计算机编程语言的时候,第一个程序就是Hello World! 延续传统,在本次机器人云实践平台的测试中,官方也为我们提供了示教例程,本文将讲述基于官方示教例程实验云平台的过程。 ……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2921浏览 0评论1734个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2500浏览 0评论2415个赞
2.3 STM32电机PID速度控制 之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2807浏览 0评论862个赞
前言 上一篇博客:ros机器人编程实践(16.1)- 仿真SmartCar之搭建模型 上一章已经成功搭建SmartCar模型,这一章在基础上做一些优化,并让他跑起来<……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3344浏览 0评论469个赞
2.4 STM32 MPU6050数据获取(IIC + DMP……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3591浏览 0评论1591个赞
ROS机器人:全网最实用的STM32和ROS的串口通信方案……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1930浏览 0评论773个赞
TF坐标变换基础 机器人建模和控制必须掌握坐标系和坐标变换等基础知识。机器人在空间中运动主要有两种形式: 平移和旋转 也就是线速度和角速度……继续阅读 » zhangrelay 5年前 (2021-04-26) 2189浏览 0评论699个赞
2.6 ROS小车STM32底层控制代码 经过之前几篇文章,我相信大家一定对下面这些模块都已经有些了……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3193浏览 0评论604个赞
上一篇文章 “高效实战及电赛训练……继续阅读 » 电子森林 5年前 (2021-04-26) 3111浏览 0评论2961个赞
嗨伙计们,忙到爆炸的月更侠罗伯特祥又来和大家见面了!今天我们来聊聊协作机器人中柔顺控制那点事儿~ 我们先来讲下本次文章的安排,首先我们要在webots中建立一个连杆模型,然后我们需要对它进行动力学建模,基于这个模型,我们通过阻抗控制使它呈现出一个柔顺的效果! &nb……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2765浏览 0评论2842个赞
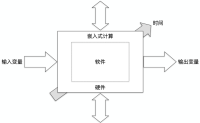
上节讲了用MCU构成的数字系统的MCU选用及资源利用。关于MCU的编程就不再赘述,就跟不同的人每天要做的事情不同一样,千差万别,靠自己去按照逻辑流程去写就是。 MCU作……继续阅读 » 电子森林 5年前 (2021-04-26) 2074浏览 0评论1292个赞
ROS2的相关课程第一次开设的时间是在2017年的“智能机器人技术综合实训课程说明”(2017-2018-1学期)。当时以一个专题的形式进行简要介绍,2018年扩展了安装、基础、导航等内容(2018-2019-1学期)。The ROS2 course was first held……继续阅读 » zhangrelay 5年前 (2021-04-26) 2595浏览 0评论2173个赞
是时候放下ROS1,开启ROS2的旅程了。It’s time to put down ROS1 and start the journey of ROS2. ROS2官方在线文档链接 ROS2 official online documentation:https:……继续阅读 » zhangrelay 5年前 (2021-04-26) 2643浏览 0评论895个赞
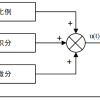
上一篇文章 “高效实战及电赛训练(2)- 数字系统的“控制”和“处理””中我简单介绍了一下构成数字系统核心的几种方式: 微控制器MCU – 通过编程用指令来控制,比……继续阅读 » 电子森林 5年前 (2021-04-26) 2406浏览 0评论1372个赞
这里要偷懒了,都是已经发过的博文,在此列一下。Because these are blogs that have been published before, so just list them here. 桌面机器人:Desktop robot: Cozmo+ROS2:http……继续阅读 » zhangrelay 5年前 (2021-04-26) 1694浏览 0评论1017个赞
……继续阅读 » 9easy_2690 5年前 (2021-04-26) 1909浏览 0评论1194个赞
官方代码: https://github.……继续阅读 » 一三五 5年前 (2021-04-26) 1843浏览 0评论2807个赞