Gmapping包提供了基于激光雷达的SLAM的方法,你可以通过一个移动机器人的激光雷达数据和位置数据来创建一个2D的栅格地图。 For more information, please click ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2887浏览 0评论156个赞
运行环境: ubuntu18.04、python3.6、tkinter 运行效果: 开机之后自动打开teminal并执行设定好的程序,进入系统后每次打开terminal都会执行一次设定的程序。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1756浏览 0评论2543个赞
1、卸載低版本 先查看是否已經安裝cmake cmake --version 如果安裝了,並……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2508浏览 0评论304个赞
两者的区别 二进制包是直接通过apt方式安装了ROS相关的软件包,而我们在GitHub上下载自己需要的源码来进行代码复用,编译通过生成可运行节点后的包是源码包,两者是可以共存的,但是运行时只能运行bash/zsh文件中默认环境下的包……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2997浏览 0评论1935个赞
棋盘格,我们通常拿来做标定用,但如果可以有这样的效果,是不是感觉高级那么一点点? 在这之前,我们还是先了解几个基本概念: <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3232浏览 0评论840个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1806浏览 0评论519个赞
Ubuntu18.04安装ROS的版本为ros-melodic Ubuntu16.04安装ROS的版本为ros-kinetic……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2014浏览 0评论355个赞
多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成、保持、变换和路径规划与避障等等都是基于图论的理论基础完成的。 详细请参考《……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2104浏览 0评论1489个赞
安装软件源 包安装方法主要有两种:软件源安装和源码编译安装。软件源(Repository)为系统提供了一个庞大的应用程序仓库,只要通过简单的命令即可从仓库中找到需要安装的软件并完成下载安装。相反,源码编译安装相对来说比较复杂,需要手动解决软件的依赖关系。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2548浏览 0评论1398个赞
rosbag既可以指命令行中数据包相关命令,也可以指 c++/pythond的 rosbag 库。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1827浏览 0评论1799个赞
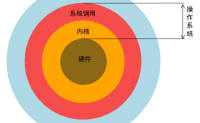
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2389浏览 0评论1196个赞
第十五届全国大学生智能车竞赛 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3207浏览 0评论1980个赞
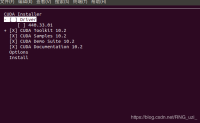
修正:Ubuntu 18.04+RTX2080Ti建议安装cuda10.0,cudnn7.5.1,pytorch1.4.0+cu100 / torchvision0.5.0+cu100,tensorflow-gpu1.14.0 修正日期:20200611 安装方式与……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1674浏览 0评论1589个赞
前言 本篇主要介绍我们队今年参赛的方案以及搭建过程,这篇本来是赛前一周就写好了的,不过还是等到赛后再来发了。体验完比赛,不得不感叹一下,大佬是真……继续阅读 » 小白 5年前 (2021-04-26) 3469浏览 0评论1049个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1731浏览 0评论1402个赞
1. 设置编码sudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_U……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3498浏览 0评论1953个赞
前言: 本文中,主要是关于OpenCV格式图片(或视频帧)和ROS数据格式图片(或视频帧)之间的转换。或者直白点书,通过ROS发送图片(Image)数据类型的消息(message)。 本文其实是为……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2783浏览 0评论1285个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1837浏览 0评论1818个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3043浏览 0评论771个赞
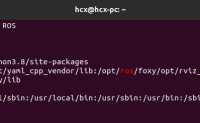
workspace是ROS2中的工作空间,也是我们开发机器人代码的位置。 ROS2安装的系统目录称之为“underlay”,我们自己创建的工作空间称之为“overlay”,在一台电脑上往往有多个工作空间。我们可以通过source不同空间的环境变量脚本来更换所使用的w……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3695浏览 0评论2320个赞
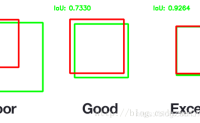
1. IOU(Intersection over Union) -交并比 IOU是一种测量在特定数据集中检测相应物体准确度的一个标准。在PASCAL VOC chall……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3521浏览 0评论2042个赞
原作者:Evan Ackerman 文章来源:IEEE Spectrum 编译:沈永强 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2304浏览 0评论903个赞
注:本篇博文全部源码下载地址为:Git Repo。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3712浏览 0评论2124个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2591浏览 0评论1356个赞
小海龟(Turtlesim)是ROS2中一个非常重要的入门级例程,通过海龟仿真,我们可以了解到很多ROS2的底层原理,涉及节点、话题、服务等核心概念。 1.安装海龟仿真器Linux:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2977浏览 0评论1520个赞
pytorch 利用tensorboard显示loss,acc曲线等 运行环境: python3.6.9 pytor……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2477浏览 0评论2760个赞
注:本篇博文全部源码下载地址为:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1845浏览 0评论490个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1961浏览 0评论208个赞
和ROS1一样,ROS2中的各项资源也是通过计算图(“ ROS (2) graph”)联系到一起的。计算图是一个由各种ROS2元素组成的网络,共同完成数据的传输,其中每一个完成具体功能的模块称之为“节点”(Node),例如控制车轮速度、获取雷达数据等,节点之间通过话题(Topic……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2922浏览 0评论666个赞
前言 记录下学习过程,《ros机器人编程实践》第三章第一个例子讲的不是很清楚……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3079浏览 0评论2603个赞
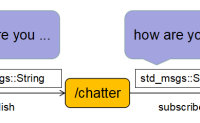
大道至简,ROS2将复杂的机器人系统拆解成许多模块节点,而这些节点之间则是通过一个至关重要的通道完成数据交换的,这个通道就是“话题”。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3434浏览 0评论1195个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2361浏览 0评论1447个赞
原作者:Michael Ferguson 文章来源:The Robot Report 编译:沈永强 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2106浏览 0评论2171个赞
前言 《Ros机器人编程实践》第三章例程二定义虚数数据类型。 实现过程 创建工作区参见上一章博客: ros机器人编程……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2789浏览 0评论2865个赞
pointnet训练文件pointnet/sem_seg/train.py注释 原文如下: import argp……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2006浏览 0评论1591个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2689浏览 0评论272个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2190浏览 0评论2222个赞
嗨,又和大家见面了!上次我们在《Webots建模指南3 -ROS控制篇(上)》这篇文章中梳理了Webots与ROS的通信过程,今天我就来带大家一起实操一下,看看Webots怎样实现ROS联合……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3053浏览 0评论1883个赞
原作者:Evan Ackerman 文章来源:IEEE Spectrum 编译:沈永强 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2821浏览 0评论1027个赞
前言 本篇内容主要是解读ROS的国赛任务以及概述几种实现方案。也祝大家都能取得满意的成绩呀~ ……继续阅读 » 小白 5年前 (2021-04-26) 2313浏览 0评论1978个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2853浏览 0评论2537个赞
效果: 卡顿现象严重,初步显示还行,后期需要寻找其他显示方法 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1849浏览 0评论957个赞
CMake的使用简介和补充知识内容概要认识CMake及应用 应用,与Gcc,Makefile……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3310浏览 0评论787个赞
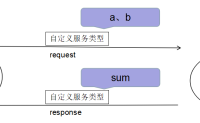
之前讲的话题通信是基于订阅/发布机制的,无论有没有订阅者,发布者都会周期发布数据,这种模式适合持续数据的收发,比如传感器数据。机器人系统中还有另外一些配置性质的数据,并不需要周期处理,此时就要用到另外一种ROS通信方式——服务(Service)。 服务是基于客户端/……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1821浏览 0评论2583个赞
距离我签约古月居已经过去了一个月了,博主因为在这一个月的时间里琐碎的事情非常的多,所以也推迟了我发博客的时间。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2000浏览 0评论2123个赞