大家好,我是(月更侠)小明,很高兴我们又见面啦。相信大家从我之前的文章中能看出来,我所讲的内容基本都面向ROS新人,因为大家刚入门时,往往很难一窥程序的深层运行逻辑,使得许多问题迟迟无法解决,甚是耽误时间。例如在和小伙伴们日常交流时,就反复遇到过一些关于Gazebo仿真控制的“经典”问题:
A 我的模型一直抖动,怎么办?
B PID参数该怎么设置啊?我怎么调都没用!
C 我必须要设置PID参数吗?如果不设置会怎么样
D gazebo_ros_control插件可以完成计算力矩控制等更加复杂的控制策略吗?
E 我的并联机器人模型只能用sdf创建,可以使用gazebo_ros_control进行控制吗?
……
通过本篇文章的分析,我们将揭晓这些问题的答案。
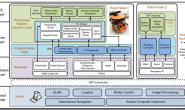
在Gazebo仿真中,我们最常使用的控制插件就是是gazebo_ros_control,它是ros_control针对Gazebo仿真开发的插件。

图1 ros_control组成概览,其中左上角方框内就是gazebo_ros_control插件所实现的功能 图片来源
该插件的详细使用方法,可参考古月居ROS探索总结系列的相关文章。简单来说,就是进行了如下三个操作:
1 在机器人模型的URDF文件中,添加gazebo_ros_control插件,并添加transmission指明了各关节控制器的类型信息
2 建立一个yaml文件,用来定义各控制器的pid参数
3 建立一个roslaunch,用来加载模型、控制参数、控制器,并发布tf
1 文件结构
接下来我们来看看gazebo_ros_control功能包究竟对这些文件做了什么。需要注意,gazebo_ros_control源码已经集成到了github帐号ros-simulation下的gazebo_ros_pkgs项目中,而ros_controls账号下的gazebo_ros_pkgs是旧版本,现在已经不再使用了。源码地址:gazebo_ros_control
该功能包的核心是硬件接口文件src/default_robot_hw_sim.cpp,该文件定义了以下函数,用以实现相应功能:
clamp():区间限定函数,用以规范某些变量的上下限
DefaultRobotHWSim::initSim():初始化插件的各项属性
DefaultRobotHWSim::readSim():从Gazebo仿真器中读取模型的信息和状态
DefaultRobotHWSim::writeSim():将目标值写入Gazebo仿真器中
下面我们分析几个重点函数。
DefaultRobotHWSim::initSim()函数初始化了整个插件,首先处理了URDF文件中transmissions模块信息,主要是以下方面:
1 定义了机器人的自由度数
2 从transmissions中获取各个关节接口类型,名称
3 判断是否使用PID控制,如果没有设置PID参数,则视为不使用PID
并对模型进行了以下处理:
1 从gazebo模型中获取关节名称,并实例化各关节
2 为各个关节gazebo模型的行程设置上下限
读取函数readSim()和写入函数writeSim(),分别实现以下功能:
1 从gazebo仿真器中读取个关节的当前状态
2 根据控制器类型将控制量写入仿真器
2 控制代码
我们看看各类型的控制方法具体是如何实现的
1 力控制
力控制十分简单,直接将目标量写入了仿真器,其中SetForce()函数是Gazebo仿真器自带的关节力设置函数。
case EFFORT:
{
const double effort = e_stop_active_ ? 0 : joint_effort_command_[j];
sim_joints_[j]->SetForce(0, effort);
}
break;
2 PID位置控制
PID位置控制稍显复杂,首先计算当前状态下的位置误差error,其中对于REVOLUTE(转动副)类型的关节,还要考虑关节限位。再利用pid_controllers下的computeCommand()方法计算当前误差下应当施加到关节上的力,并使用区间限定函数clamp()来规范力的上下限。从此处可以看出,gazebo_ros_control插件实际上使用了输入力的PID位置控制,该方法的原理可见我在古月居发表的第一篇文章。最后,利用SetForce()函数将目标量写入了仿真器。
case POSITION_PID:
{
double error;
switch (joint_types_[j])
{
case urdf::Joint::REVOLUTE:
angles::shortest_angular_distance_with_limits(joint_position_[j],
joint_position_command_[j],
joint_lower_limits_[j],
joint_upper_limits_[j],
error);
break;
case urdf::Joint::CONTINUOUS:
error = angles::shortest_angular_distance(joint_position_[j],
joint_position_command_[j]);
break;
default:
error = joint_position_command_[j] - joint_position_[j];
}
const double effort_limit = joint_effort_limits_[j];
const double effort = clamp(pid_controllers_[j].computeCommand(error, period),
-effort_limit, effort_limit);
sim_joints_[j]->SetForce(0, effort);
}
break;
3 PID速度控制
PID速度控制函数和PID位置控制函数的逻辑完全一致,唯一的区别是误差error取的是速度误差。
case VELOCITY_PID:
double error;
if (e_stop_active_)
error = -joint_velocity_[j];
else
error = joint_velocity_command_[j] - joint_velocity_[j];
const double effort_limit = joint_effort_limits_[j];
const double effort = clamp(pid_controllers_[j].computeCommand(error, period),
-effort_limit, effort_limit);
sim_joints_[j]->SetForce(0, effort);
break;
4 非PID的位置控制和速度控制
如果不使用PID控制,那么硬件会直接调用Gazebo的SetPosition()和SetVelocity()接口,强行设置关节的位置和速度,而非通过输入力的方式进行控制。代码分别位于320行到330行,以及359行到372行。
3 答案揭晓
根据源码的分析,我们在Gazebo仿真中的很多“万年难题”就迎刃而解啦!例如:
A 我的模型在仿真时一直抖动,怎么办?
答:在保证模型惯量属性、关节摩擦、阻尼合理的前提下,调整PID参数。从源码看到,控制器的PID控制实际上是输入力的PID控制,模型物理属性不符合真实情况、PID参数不合理必然导致关节振荡。这也提醒我们,良好的Gazebo仿真,其前提是真实的物理模型和合理的理论推导。务必不要将其当做纯动画制作软件!


图2 图3 由于质量属性\PID参数不合理,机械臂发生了细微的或鬼畜般的抖动。 图片来源
B PID参数该怎么设置啊?我怎么调都没用!
答:自己努力吧孩子!还是如上一个问题所述,在仿真之前,先进行完整的控制理论推导,而非随便尝试。提供两个小技巧:动态配置插件Dynamic Reconfigure可以方便地动态调整PID参数,如图。另外尤其要注意一个问题:gazebo_ros_control对于PID中的积分增益i是默认锁定为0的,要想使用积分控制,需要在yaml文件中打开积分增益的上下限,否则无论怎么调积分增益都没有用的(坑…)。
# pid增益的正确配置姿势(如要使用积分控制,必须打开积分增益的上下限,否则默认均为0)
joint1_position_controller:
type: effort_controllers/JointPositionController
joint: joint_1
pid: {p: 100.0, i: 1.0, d: 10.0, ,i_clamp_max: 0.0, i_clamp_max: 1.0}

图4 PID参数动态配置插件Dynamic Reconfigure
C 我必须要设置PID参数吗?如果不设置会怎么样
答:不是必要的,但推荐在yaml中设置PID参数。从源码中可以看到,gazebo_ros_control插件会自动判断用户是否在yaml文件中设置了PID参数。如果没有,当用户使用位置控制和速度控制时,就会调用Gazebo默认的位置和速度设置接口。而根据注释信息可以看到,如果你的Gazebo版本小于9,这样做就是有坏处的:仿真器不会模拟模型的重力,会导致动力学仿真异常。因此,我们最好还是在yaml文件中设置合理的PID参数。
ROS_WARN_ONCE("The default_robot_hw_sim plugin is using the Joint::SetPosition method without preserving the link velocity.");
ROS_WARN_ONCE("As a result, gravity will not be simulated correctly for your model.");
ROS_WARN_ONCE("Please set gazebo_pid parameters, switch to the VelocityJointInterface or EffortJointInterface, or upgrade to Gazebo 9.");
ROS_WARN_ONCE("For details, see https://github.com/ros-simulation/gazebo_ros_pkgs/issues/612");

图5 在gazebo9以前的版本中,一只手由于没有设置PID参数导致重力异常,悬浮在空中。图片来源
D gazebo_ros_control插件可以完成计算力矩控制等更加复杂的控制策略吗?
答:需要基于插件的自定义接口自己编写程序。从源码中看到,插件所提供的控制策略只有基本的PID控制,其输入量的计算只考虑了误差,并没有考虑任何动力学模型,详见control_toolbox项目下的src/pid.cpp文件。
E 我的并联机器人模型只能用sdf创建,可以使用gazebo_ros_control进行控制吗?
答:不可以。从源码看出,控制器类型等相关信息必须从urdf下的transmissions获取,甚至在注册关节限位时也使用了urdf类,而并没有支持sdf格式。不过,由于sdf是Gazebo默认的支持格式,有完整的官方文档提供,因此根据gazebo_ros_control的逻辑重新创建一个适用于sdf的控制插件其实并不困难。

图6 笔者利用sdf创建的六自由度并联机器人,使用自定义Gazebo控制插件
以上就是我们从源码中找到的答案,有没有解决你的一些疑惑呢?
如果你还想进一步交流,欢迎在这篇文章下给我留言。