……继续阅读 » 古月 5年前 (2021-04-26) 2757浏览 0评论750个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2306浏览 0评论2750个赞
?上周四(9月28日),星火在线课堂举办了第一次在线课程,我有幸成为第一位分享嘉宾,与大家分享了一下MoveIt!的相关内容,直播过程中共有800多位小伙伴共同参……继续阅读 » 古月 5年前 (2021-04-26) 2499浏览 0评论744个赞
~欢迎关注~ 微信公众号:古月居 新浪微博:……继续阅读 » 古月 5年前 (2021-04-26) 3377浏览 0评论743个赞
~欢迎关注~ 微信公众号:古月居 新浪微博:……继续阅读 » 古月 5年前 (2021-04-26) 1824浏览 0评论179个赞
MoveIt是ROS中非常强大的一个开发平台,可以为机器人开发提供六大功能支持,真正做到不写一行代码,就可以从零完成各种炫酷的机器人应用功能。 ……继续阅读 » 古月 5年前 (2021-04-26) 3367浏览 0评论2078个赞
本文参考Moveit官方教程,原文链接见文末。已经过本人踩坑验证:系统版本:ubuntu16.04ROS版本:Kinetic ……继续阅读 » 小明工坊 5年前 (2021-04-26) 3211浏览 0评论1112个赞
前言 如果是第一次使用Moveit!,建议先按照 ……继续阅读 » 小明工坊 5年前 (2021-04-26) 2894浏览 0评论119个赞
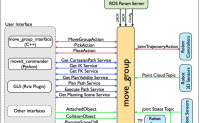
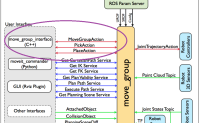
本文参考Moveit!官方文档。 系统:ubuntu 18.04 / 16.04 ROS:Melodic / Kinetic概述基于python的运动组API是最简单的……继续阅读 » 小明工坊 5年前 (2021-04-26) 3557浏览 0评论780个赞
注:本篇博文全部源码下载地址为:Git Repo。……继续阅读 » Shawn0102 5年前 (2021-04-26) 3869浏览 0评论674个赞
注:本篇博文全部源码下载地址为:……继续阅读 » Shawn0102 5年前 (2021-04-26) 2950浏览 0评论2431个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » Shawn0102 5年前 (2021-04-26) 1714浏览 0评论1424个赞
参考代码:https://github.com/tork-a/jog_control.git 将参考代码功能包放置到自己机械臂功能包同一目录下。在工作空间进行编译catkin_make编译可能遇到的两个问题: 1)缺少fake-jo……继续阅读 » 搁浅 5年前 (2021-04-26) 3116浏览 0评论2552个赞
UR5介绍 Universal Robots(优傲机器人)公司是一家引领协作机器人全新细分市场的先驱企业,该公司成立于2005年,关注机器人的用户可操……继续阅读 » 编程芝士 5年前 (2021-04-26) 3201浏览 0评论213个赞
OMPL能做什么? 简单说,就是提供一个运动轨迹。给定一个机器人结构(假设有N个关节),给定一个目标(比如终端移到xyz),给定一个环境,那么OMPL会提供给你一个 轨迹,也就是一个完整的关节位置。沿着这个轨迹依次移动关节,就可以最终把终端移到xyz,当然,……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3533浏览 0评论2122个赞
# 开始控制真实世界的机械臂 ####### 我们的目的是使用moveit控制真实的机械臂,而我们真正需要的action是Fol……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3457浏览 0评论1880个赞
ROS……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2262浏览 0评论1255个赞