坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 小明工坊 5年前 (2021-04-26) 2768浏览 0评论1743个赞
坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 小明工坊 5年前 (2021-04-26) 2324浏览 0评论415个赞
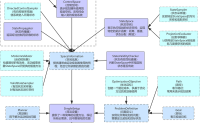
1 回顾上一篇文章中,我们介绍了如何使用OMPL进行单刚体运动规划。其中包含以下步骤:· ……继续阅读 » 小明工坊 5年前 (2021-04-26) 3089浏览 0评论2638个赞
1 回顾与引出——什么是最短路径? 在……继续阅读 » 小明工坊 5年前 (2021-04-26) 3545浏览 0评论906个赞
书接上回,……继续阅读 » tloinny 5年前 (2021-04-26) 3402浏览 0评论411个赞
上一回,我们讲完了A*的工作原理,与Dijkstar相比A*确实有一……继续阅读 » tloinny 5年前 (2021-04-26) 2130浏览 0评论2826个赞
小伙伴们似乎对RRT有种莫名的期待,从大概四个月前,我第一次更新运动规划入门系列的时候就有小伙伴催着要看RRT了,那么今天就满足你们。 书接上回,我们上次讲完了PRM,我们知道PRM是一个概率完备,但是非最优的路径规划算法。所谓概率完备,意思就是说假如在规划的起点和……继续阅读 » tloinny 5年前 (2021-04-26) 2134浏览 0评论2038个赞
先挖个坑:实现基于python的DFS,BFS ……继续阅读 » 一三五 5年前 (2021-04-26) 2317浏览 0评论2934个赞
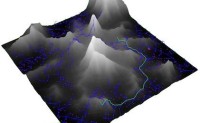
上一篇,我们讲完了RRT,这回我们来讲运动规划入门系列的最后一个算法——人工势场法。回想当时我第一次听说人……继续阅读 » tloinny 5年前 (2021-04-26) 2843浏览 0评论2461个赞
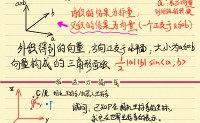
vSLAM的数学铺垫。 1. 点与坐标系 <……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2879浏览 0评论2510个赞
前言:几天前就在打浦桥程序员公众号上了解到MATLAB 2020b更新的消息,过了几天才在Mathwor……继续阅读 » 二民院小学生 5年前 (2021-04-26) 1651浏览 0评论2561个赞