分上下篇吧,一共有七八十个公式呢 ^-^ 写在一篇就太长了 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3352浏览 0评论1550个赞
接着上篇:从零手写VIO——(三)基于优化的 IMU 与视觉信息融合(上篇) 再次说明一下,本博客目前只是我在看深蓝时记录的,当然会有很多 PPT 上的内容,加上一点自己学的……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1962浏览 0评论2430个赞
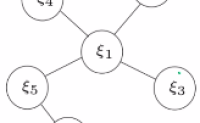
滑动窗口算法 图优化基础 在十四讲中,我们已经接触了图优化以及如何使用 g2o 进行后端优化。 圆圈 Vertex:表示顶点,需要优化估计的变量。……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2619浏览 0评论1485个赞
从高斯分布到信息矩阵 某个状态 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1937浏览 0评论926个赞
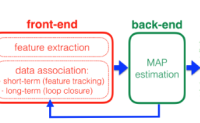
补充 深蓝学院-手写VIO 第六章 与《十四讲》前端知识不重合的部分。内容较少,没有前几章丰富。 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1505浏览 0评论2539个赞
目录 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1928浏览 0评论1499个赞
目前网上有很多分析文章,但是都只是一些比较基础的原理分析,而且很多量,虽然有推倒,但是往往没有讲清楚这些量是什么,为什么要有这些量,这些量是从哪来的,也没有刷通整个代码,或者太简练了,对新手不友好。这一次我计划从原理/代码一步步刷通整个VINS,并且说清楚代码中遇到的每一个数据结……继续阅读 » iwande 5年前 (2021-04-26) 2706浏览 0评论2568个赞
这个系统是基于香港科技大学飞行机器人组的开源框架VINS-Mono开发的,原开源框架是针对单目SLAM。本双目SLAM系统是在原单目开源框架基础上的二次深度开发,外部接口与原框架一致。这个项目是我的研究课题项目,非商业用途,感谢HKUST的沈老师课题组提供的开源框架。该项目的gi……继续阅读 » iwande 5年前 (2021-04-26) 2522浏览 0评论1526个赞
6.初始化 第一个问题,为什么要初始化? 对于单目系统而言, (1)视觉系统只能获得二维信息,损失了一维信息(深度),所以需要动一下,也……继续阅读 » iwande 5年前 (2021-04-26) 2895浏览 0评论362个赞
6.2 代码解析 这部分代码在e……继续阅读 » iwande 5年前 (2021-04-26) 2702浏览 0评论1724个赞
7.后端非线性优化 7.1 理论基础 ……继续阅读 » iwande 5年前 (2021-04-26) 2915浏览 0评论2501个赞
7.2 代码 在estimator.cpp的processImage()的最后,代码如下: else//solver_flag = NON_……继续阅读 » iwande 5年前 (2021-04-26) 3498浏览 0评论1927个赞
8.sliding window8.1 理论基础 实际上,这一部分跟后端非线性优化是一起进行的,这一部分对应的非线性优化的损失函数的先验……继续阅读 » iwande 5年前 (2021-04-26) 2119浏览 0评论2423个赞
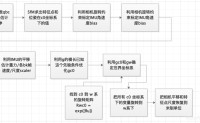
4.IMU预积分 IMU预积分主要干了2件事,第一个是IMU预积分获得α、β、γ值,另一个是误差传递函数的获取。本部分的流程图如下图所示。 ……继续阅读 » iwande 5年前 (2021-04-26) 3115浏览 0评论1637个赞
直接总结吧:这一节描述的视觉里程计就是检测特征点,特征点匹配,匹配上以后算位姿和深度。 特征点检测: Fast特征点:……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2993浏览 0评论902个赞
这次的笔记我把13讲的部分内容总结一下。 虽然slam的名字叫同步定位与构图,但是书中建图的内容却少的可怜。据此高博给出了自己的解释,意为在定位的过程中,我确定了很多特征点的世界坐标,那这个过程其实就是建图了。一个点云中,每个已知世界坐标系的特征点给它的位置塞一个点,那这不就是建……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3208浏览 0评论983个赞
本章的内容没有理论知识,完全是由实践部分组成的。 本章主要有两大难点。 第一,g2o的使用。对此,我总结了到了之前的一章中: SLAM14讲学习笔记(十一)g2o图优化中的……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3270浏览 0评论1889个赞