快速随机搜索树(Rapidly-Exploring Random Tree, RRT)算法是移动机器人或机械臂常用的轨迹规划算法,用于规划出一条运动轨迹。其主要步骤分以下几步: 1. 初始化需要规划的2D或3D地图,给出移动机器人或机械臂要运动的起点和终点坐标,树的根部在起点。 ……继续阅读 » 古月光翟氵青 5年前 (2021-04-26) 2907浏览 0评论1621个赞
1、前记: 此篇说说利用如何在Matlab中进行机器人轨迹规划(Trajectory Planning)。先利用机器人工具箱(Robotics Toolbox)函数……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2510浏览 0评论1258个赞
一、运动规划算法简述 实现流程 通过给定的轨迹点,根据设定的最大速度和加速度计算每个点的速度,加速度和时间帧。 轨迹点:可通过插补获得,数据类型为moveit_msgs::RobotTraje……继续阅读 » white_Learner 5年前 (2021-04-26) 3506浏览 0评论1262个赞
多姿态插补用于多个连续的姿态,此处采用Squad插值,贝塞尔相关参考深入理解贝塞尔曲线……继续阅读 » white_Learner 5年前 (2021-04-26) 2827浏览 0评论2318个赞
先上结论: 在构型空间(也就是C空间中),不管机器人的构型如何,有几个自由度,它在构型空间中都只是一个点!!! 1. Work-Sp……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 1855浏览 0评论1950个赞
笛卡尔运动规划Python接口https://blog.csdn.net/qq_32618327/article/details/999669……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3298浏览 0评论2194个赞
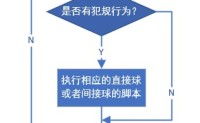
写在前面之前我已经写过了关于这个足球机器人4V4对抗赛的总思路,具体请看以下链接……继续阅读 » better_coder 5年前 (2021-04-26) 2144浏览 0评论2387个赞
A*算法是一种Greedy算法,ROS中的navigation导航包中的global_planner中就能找到。今天,我们从头入手,自己移植并完成关于A*算法在ROS上的移植和实现。首先来说一下我们最后想实现的目的:我们……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2813浏览 0评论783个赞
前言在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自……继续阅读 » 我是。 5年前 (2021-04-26) 2958浏览 0评论1615个赞