机器人工具箱中的SerialLink 类中有现成的函数: SerialLink.fkine(theta),可以直接对已经建立的机器人模型做运动学分析 SerialLink.ikine(T) 可以求逆运动学参数。 ……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3030浏览 0评论2270个赞
很多同学会把路径规划(Path Planning)和轨迹规划(Trajectory Planning)这两个概念混淆,路径规划只是表示了机械臂末端在操作空间中的几何信息,比如从工作台的一端(A点)沿直线移动到另一端(B点)。而轨迹规划则加上了时间律,比如它要完成的任务是从A点开始……继续阅读 » gpeng832 5年前 (2021-04-26) 2074浏览 0评论2398个赞
时间:2020年4月9日 对之前内容做补充,加入支撑相轨迹规划,并构造完整的的周期曲线 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一个合……继续阅读 » 我是。 5年前 (2021-04-26) 3476浏览 0评论892个赞
本文的内容是对另一篇文章(链接)的补充,对Trajectory_example.cpp涉及到的原理作一些简单的讲解,主要内容是: (1)机器人路径规划圆弧过渡的原理;……继续阅读 » gpeng832 5年前 (2021-04-26) 3537浏览 0评论517个赞
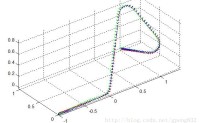
描述 使用贝塞尔曲线生成路径 已知:若干个二维路径点(x, y),生成一段由一系列(x, y)点组成的点集 公式 网上有很多贝塞尔曲线的概念和知识,这里不做赘述 ……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1755浏览 0评论2872个赞
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 1945浏览 0评论2217个赞
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 3417浏览 0评论1545个赞
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的。闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver。 这里介绍Nicholas Roy文章中闭式求解的方法。1. QP……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2718浏览 0评论2608个赞
目的 对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供指导。 AGV……继续阅读 » robinvista 5年前 (2021-04-26) 1765浏览 0评论1192个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 2914浏览 0评论1113个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 2244浏览 0评论1871个赞