……继续阅读 » 古月 5年前 (2021-04-26) 1910浏览 0评论2592个赞
~欢迎关注~ 微信公众号:古月居 新浪微博:……继续阅读 » 古月 5年前 (2021-04-26) 3080浏览 0评论2521个赞
最近,yolo之父Joseph Redmon退出CV界以表达抗议,拒绝AI算法用于军事和隐私窥探。计算机视觉这把双刃剑已经日益深入到我们的生活,虽说大神已经退圈,但我们的研究还是要继续。 为了实现一套……继续阅读 » 大雄 5年前 (2021-04-26) 2542浏览 0评论155个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2324浏览 0评论2162个赞
给定一个立方体模型,通过深度相机将模型点云提取出来并保存为模板,然后在不同位置进行拍摄,能够将模型信息复原出来吗? 答案肯定是可以的,借助于相机投影模型的……继续阅读 » Z 5年前 (2021-04-26) 1756浏览 0评论1852个赞
前言 本文讲解如何在游戏欧卡2中使用深度学习框架实现无人驾驶,为什么选择欧卡2?虽然ROS中也有真实汽车的仿真环境但是世界场景过于简单,而游戏欧……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1670浏览 0评论1220个赞
手把手教你从零开始控制各种自由度的机械臂……继续阅读 » 古月居官方 5年前 (2021-04-26) 3301浏览 0评论778个赞
Demo测试时需要岸上PC与树莓派在同一局域网下运行,二者能进行通信。下水测试时总的设备连接大致如下图。 ……继续阅读 » cabinx 5年前 (2021-04-26) 3386浏览 0评论304个赞
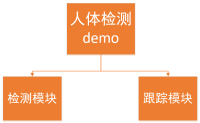
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » cabinx 5年前 (2021-04-26) 1805浏览 0评论1757个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,本次测试的是能对物体进行快速识别,甚至定位的find_object包,该功能包是基于模板匹配算法(包括彩色图像或点云匹配)。ubunt……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3985浏览 0评论2794个赞
魔方机器人(二) 颜色识别 今天,就让我们来看看魔方的颜色识别是如何做到的。做图像处理的话我们可以用OpenCV(用到了颜色空间的转换RGB转HSV以及ROI区域提取),全称为Open Source Computer Vision Library,……继续阅读 » Yang1024skr 5年前 (2021-04-26) 3204浏览 0评论1643个赞