机器人运动学与动力学入门(一)自由度与连杆机构
在讨论机器人运动之前,先复习一些基本概念(啰里吧嗦环节)。已经了解的童鞋可以自行跳过该节。 1.自由度(degree of freedom) 自由度描述一个物体可以自由运动的独立程度(废话) 比如:
- 一个只有一根坐标轴的系统上的点只可以左右运动,只能用一个值x来唯一描述,所以只有一个自由度。
- 一个平面上的一个点可以用(x,y)唯一表征它的位置,因此有两个自由度。
- 一个三维坐标系上的一个点需要用(x,y,z)来唯一表征它的位置,因此有三个自由度。 那么,什么是机器人的自由度? 在回答这个问题之前,需要了解一下什么是刚体,什么是机器人。
2.机器人定义 我们这里研究的机器人具体代指一类由连杆(link)+ 关节(joint)组成的连杆机构(linkage),强调一下连杆和关节,因为以后我们会经常跟这两个词打交道,这些连杆都是刚体(rigid body)。
刚体(百度百科:刚体是指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物 体)
有两种类型的的连杆机构:级联链(serial chains)和平行链(parallel chains) 也叫开链和闭合链。 级联链结构机器人  优点:相对于平行链机器人,工作范围更广 缺点:因为误差一级级积累,因此相对于平行链机器人,精度要低一些。也因为每一级关节单独受力,所以载重也相对低。 平行链结构机器人
优点:相对于平行链机器人,工作范围更广 缺点:因为误差一级级积累,因此相对于平行链机器人,精度要低一些。也因为每一级关节单独受力,所以载重也相对低。 平行链结构机器人  优点:相对于级联链机器人,精度高,载重大 缺点:相对于级联链结构机器人,工作范围小 3.运动 运动(motion)包括两种:平移(translation)和旋转(rotation),因此:
优点:相对于级联链机器人,精度高,载重大 缺点:相对于级联链结构机器人,工作范围小 3.运动 运动(motion)包括两种:平移(translation)和旋转(rotation),因此:
- 在二维平面里,一个刚体有三个自由度:两个平移的自由度(x,y),一个旋转的自由度。
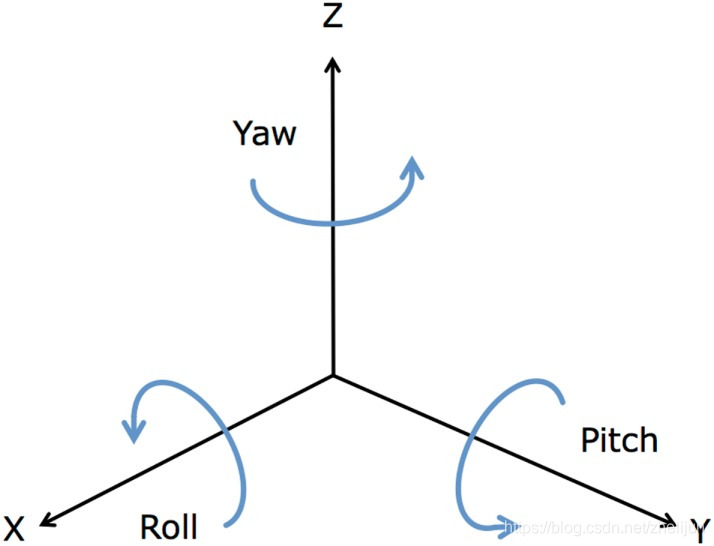
- 在三维坐标系中,一个刚体则有六个自由度: 三个平移自由度(x,y,z),三个旋转自由度(roll,pitch,yaw)(这三个旋转自由度符合右手旋转定则,见下图)
 4.关节与连杆的符号表达 可以使用以下表达方式来给我们要研究的机器人结构建模 连杆: 通常用一根线段表示连杆
4.关节与连杆的符号表达 可以使用以下表达方式来给我们要研究的机器人结构建模 连杆: 通常用一根线段表示连杆 自由度与连杆机构") 关节:
关节:
- 旋转关节一
自由度与连杆机构") 这是一个z轴指向外面,逆时针为正的旋转关节
这是一个z轴指向外面,逆时针为正的旋转关节
- 旋转关节二
自由度与连杆机构") 这是一个z轴沿着连杆指向左或者右,绕着z轴旋转的旋转关节
这是一个z轴沿着连杆指向左或者右,绕着z轴旋转的旋转关节
- 平移关节
自由度与连杆机构") 这是一个沿着连杆伸长缩短的平移关节
这是一个沿着连杆伸长缩短的平移关节
- 末端执行器
自由度与连杆机构")
一个连杆机构机器人模型 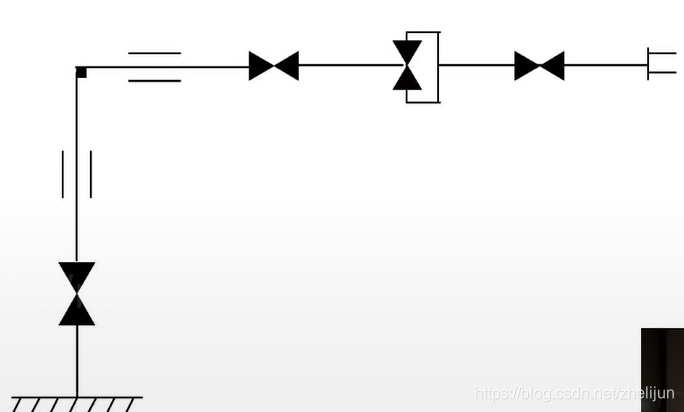 至此我们就可以用这些符号表达轻松地给我们要研究的机器人建模了。 到这里我们再看一开始的问题:什么是机器人的自由度? 可以发现,一个关节就代表了一个自由度。因此,想要知道一个机器人有多少自由度,只要数出有多少个关节就可以了。
至此我们就可以用这些符号表达轻松地给我们要研究的机器人建模了。 到这里我们再看一开始的问题:什么是机器人的自由度? 可以发现,一个关节就代表了一个自由度。因此,想要知道一个机器人有多少自由度,只要数出有多少个关节就可以了。




