事先说明
图像梯度原理:简单来说就是求导 OpenCV提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr和Laplacian。Sobel和Scharr是求一阶或二阶导数。Scharr是对Sobel(使用小的卷积核求解梯度角度时)的优化,Laplacian是求二阶导数。
任务1:Sobel算子和Scharr算子
Sobel算子是高斯平滑与微分操作的结合体,它的抗噪音能力很好。可以设定求导的方向(xorder或yorder)。还可以设定使用的卷积核的大小(ksize),如果ksize=-1,会使用3×3的Scharr滤波器,效果会更好,若速度相同,在使用3×3滤波器时尽量使用Scharr。 3×3的Scharr滤波器卷积核如下: X方向: -3 0 3 -10 0 10 -3 0 3 Y方向 -3 -10 -3 0 0 0 3 10 3
任务2:Laplacian算子
拉普拉斯算子可以使用二阶导数的形式定义,可假设其离散实现类似于二阶Sobel导数,事实上OpenCV在计算拉普拉斯算子时直接调用Sobel算子。 拉普拉斯滤波器使用的卷积核:
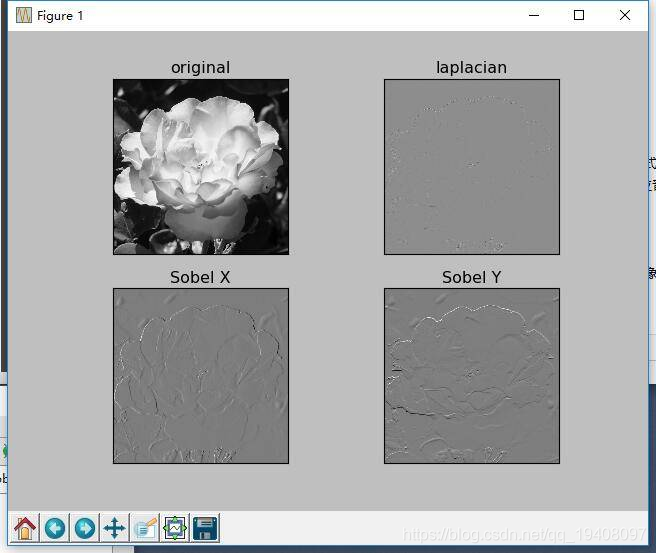
从零开始,简单快速学机器仿人视觉Opencv---第十四节:图像梯度") 示例:用以上三种滤波器对同一幅图像进行操作,卷积核使用为5×5。
示例:用以上三种滤波器对同一幅图像进行操作,卷积核使用为5×5。
import cv2
import numpy
img = cv2.imread('1024.jpg',0)
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
cv2.imshow('original',img)
cv2.imshow('lap',laplacian)
cv2.imshow('sobelx',sobelx)
cv2.imshow('sobely',sobely)
cv2.waitKey(0)
cv2.destroyAllWindows()
一个重要的事!
当我们可以通过参数-1来设定输出图像的深度(数据类型)与原图像保持一致,但是我们在代码中使用的却是cv2.CV_64F。这是为什么?想象一下一个从黑到白的边界的导数是正数,而一个从白到黑的边界的导数却是负数。如果原图像的深度是np.int8时,所有的负值都会被截断变成0。换句话就是把边界丢失掉。 所以如果这两种边界你都想检测到,最好的办法就是将输出的数据类型设置的更高,比如cv2.CV_16S等,取绝对值然后再把它转回到cv2.CV_8U。
总结
(本系列每周不定期更新,谢谢大家支持!)