- 准备工作
安装桌面完整版ROS
sudo apt-get install ros-indigo-desktop-full安装ROS-Gazebo组件
sudo apt-get install ros-indigo-gazebo-ros-*安装turtlebot相关包
sudo apt-get install ros-indigo-turtlebot-*- 正式开始
启动Gazebo并加载机器人、环境模型
roslaunch turtlebot_gazebo turtlebot_world.launch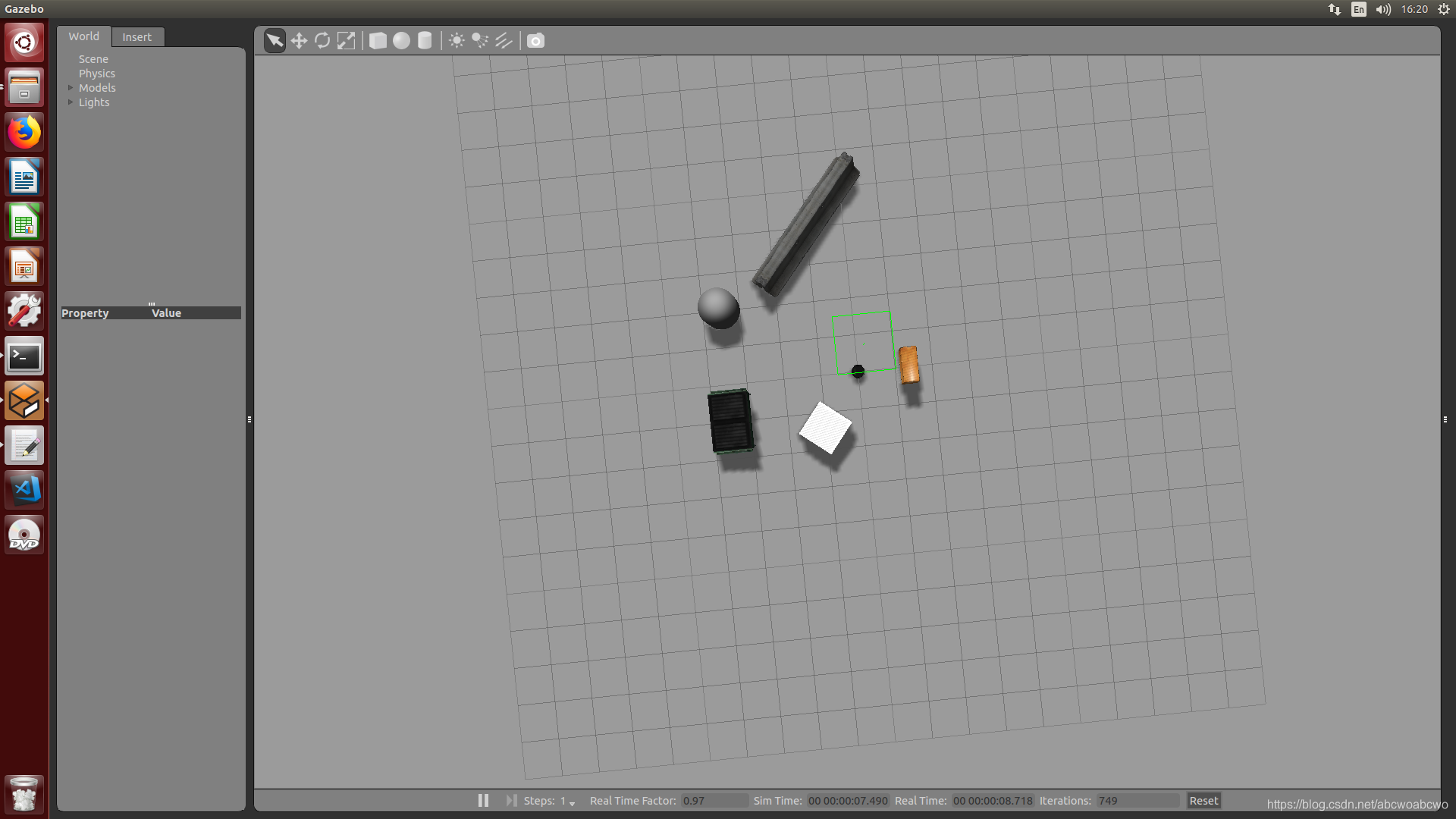
启动键盘遥控节点
roslaunch turtlebot_teleop keyboard_teleop.launch --screen 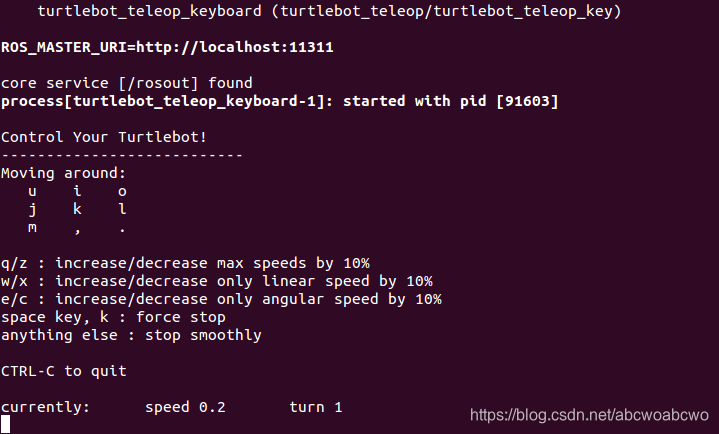
运行gmapping
roslaunch turtlebot_gazebo gmapping_demo.launch
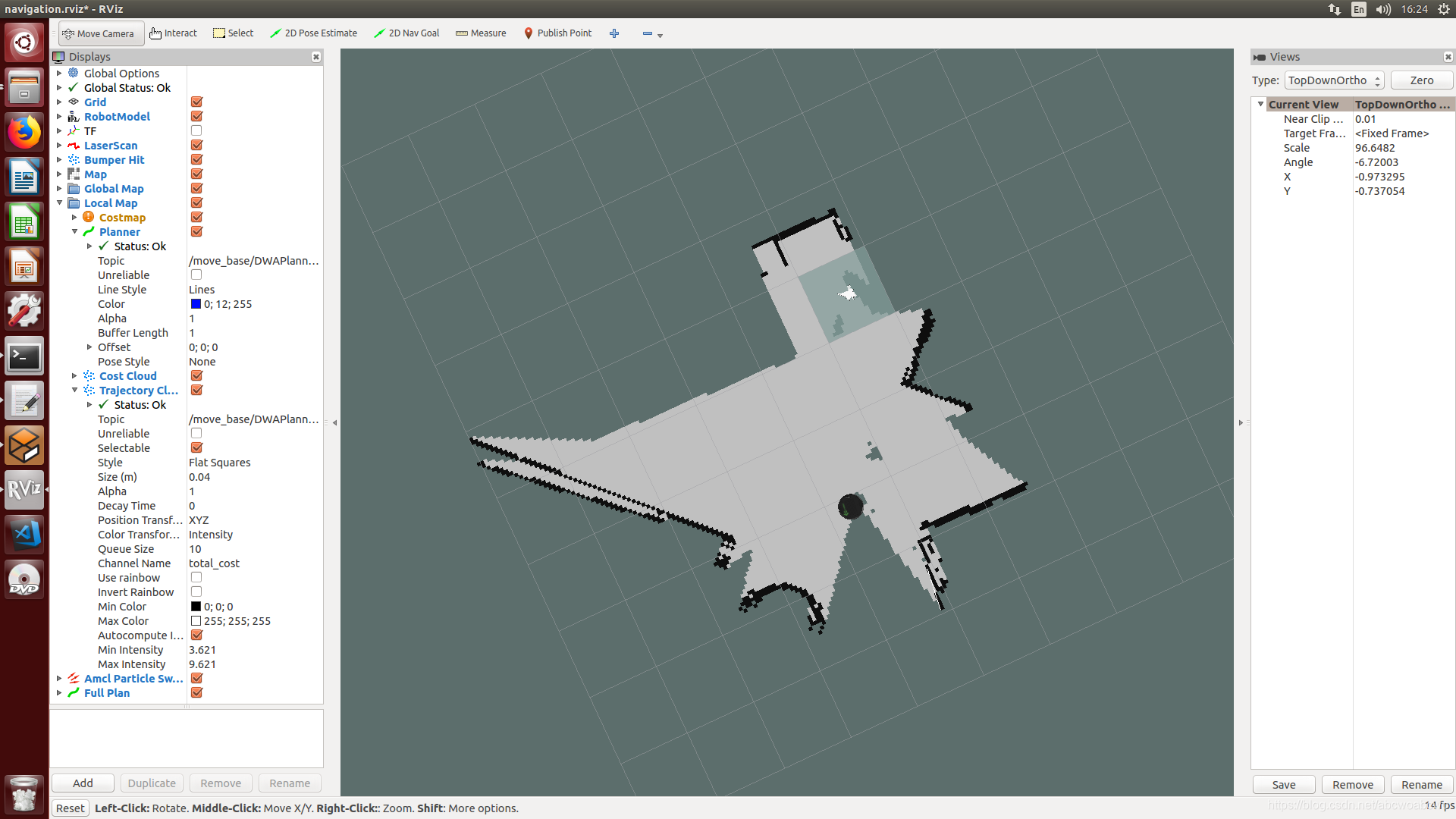
开启rviz观察建图过程
roslaunch turtlebot_rviz_launchers view_navigation.launch