① 背景
Turtlesim (小乌龟是第一步)就像是 hello world 一样 rqt 是命令行的GUI工具,可以点点点的
② 前提
- 安装了ROS2
- 配置好了环境
- dshing 之后的版本才有小乌龟
③ 任务
Ⅰ turtlesim
安装turtlesim
命令:
sudo apt update
sudo apt install ros-dashing-turtlesim检查下
ros2 pkg executables turtlesim
这样就对了
![[ros2学习]-CLI Tools - 介绍turtlesim和rqt](https://img-blog.csdnimg.cn/20200402105312598.png "[ros2学习]-CLI Tools - 介绍turtlesim和rqt")
启动turtlesim
命令:
ros2 run turtlesim turtlesim_node
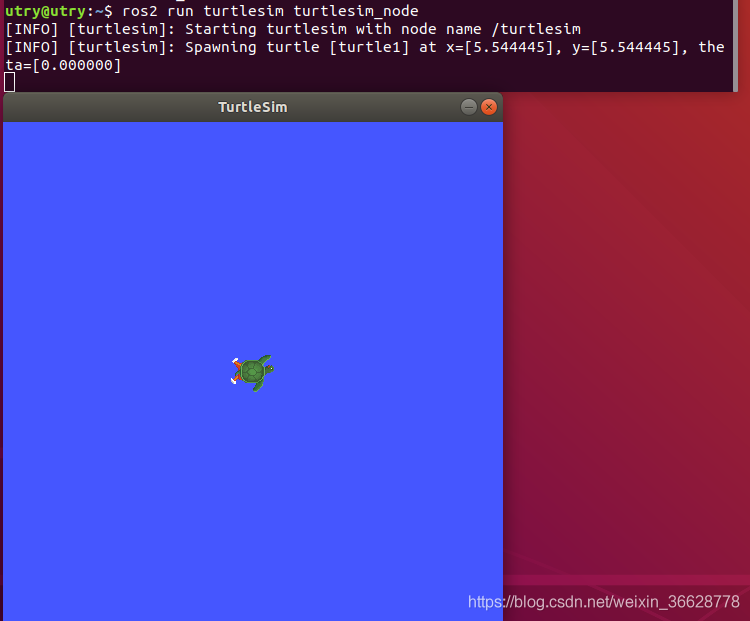 启动了节点==/turtlesim==
启动了节点==/turtlesim==
通过键盘控制小乌龟
重新开个终端,启动键盘控制节点:
ros2 run turtlesim turtle_teleop_key
控制
 这个小乌龟有心跳监测,你释放键盘一会之后就会停
这个小乌龟有心跳监测,你释放键盘一会之后就会停
Ⅱ rqt
安装rqt
sudo apt update
sudo apt install ros-dashing-rqt-*
![[ros2学习]-CLI Tools - 介绍turtlesim和rqt](https://img-blog.csdnimg.cn/20200402111510156.png "[ros2学习]-CLI Tools - 介绍turtlesim和rqt")
使用rqt
命令: rqt 这个空白的
 点击
点击 Plugins > Services > Service Caller
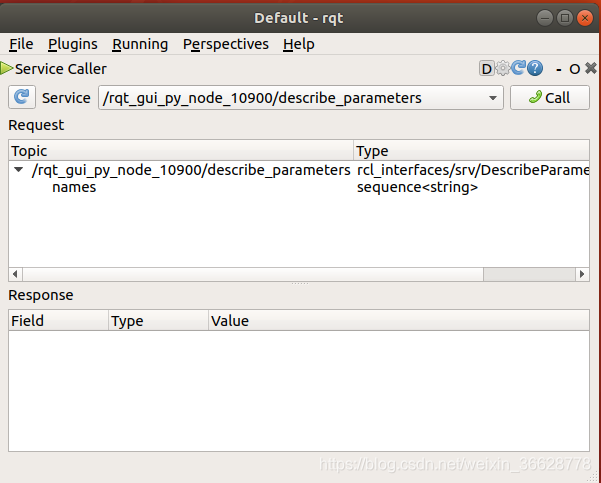
设置/spawm
可以增加乌龟通过rqt,添加重复的会报错

修改路径画笔的颜色
通过server /turtle1/set_pen

重定向
可以把topic 重定向到另一个topic上去 命令:
ros2 run turtlesim turtle_teleop_key turtle1/cmd_vel:=turtle2/cmd_vel

④ 总结
小乌龟和rqt是必须要了解的




