一、UR机器人坐标系
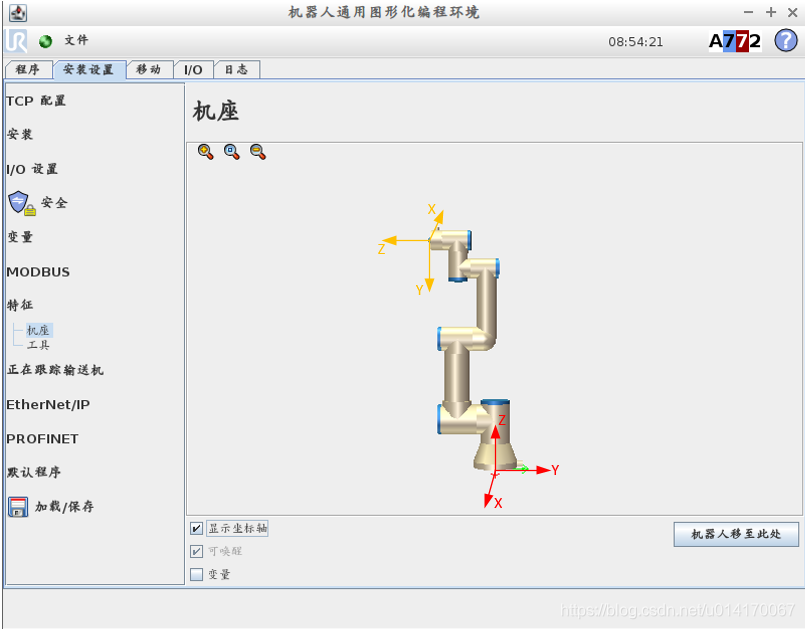
默认情况下UR机器人的基坐标系和TCP如下图所示:
注意这里的TCP位置和坐标系都是在默认TCP配置的情况下,默认的TCP配置如下图所示:
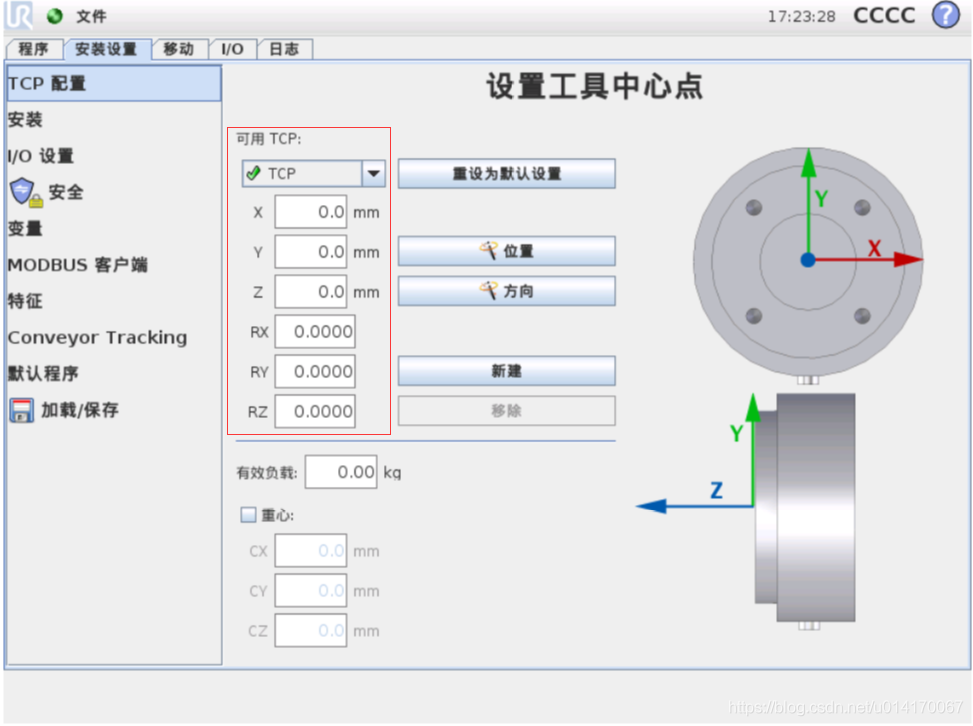
如果用户想要自己设置TCP的位置和坐标系就可以在这个基础上进行配置,上图中的X,Y,Z,RX,RY,RZ表示用户自定义TCP与机器人默认TCP之间的关系(注意不是相对于基坐标系的关系)。X,Y,Z表示位置关系,RX,RY,RZ是使用的旋转矢量法表示的姿态关系,旋转矢量法见下一节。
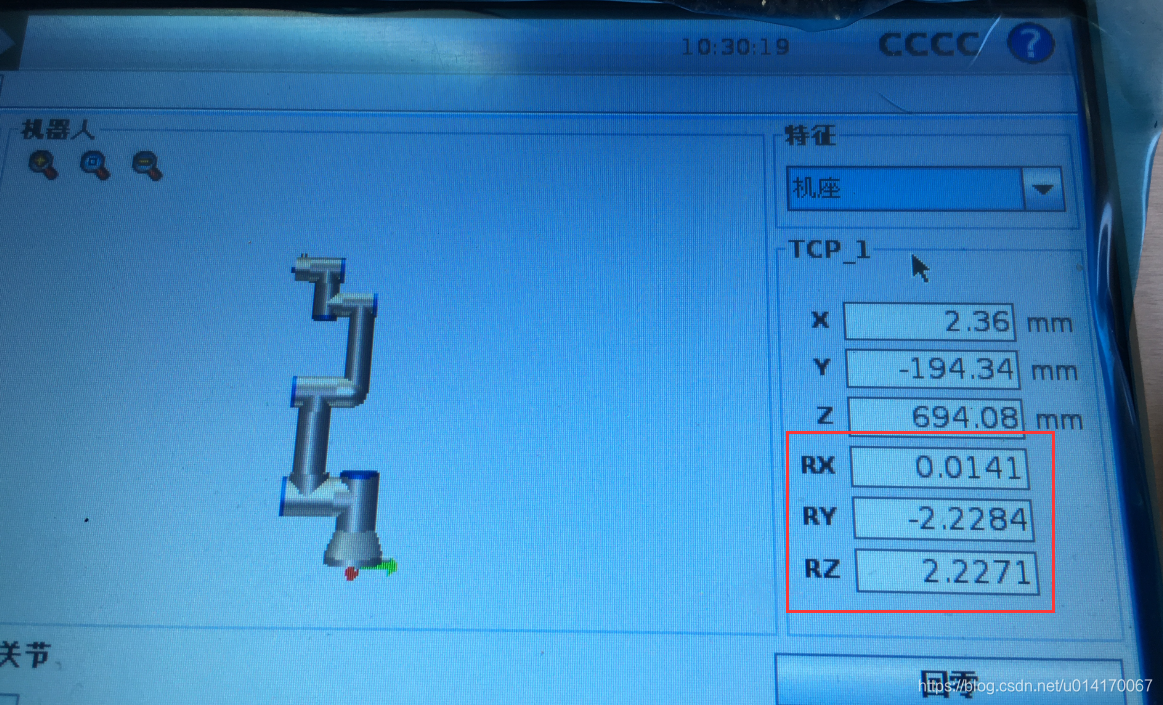
当UR机器人回零后,机器人默认的TCP相对于基座标系的位姿如下图:
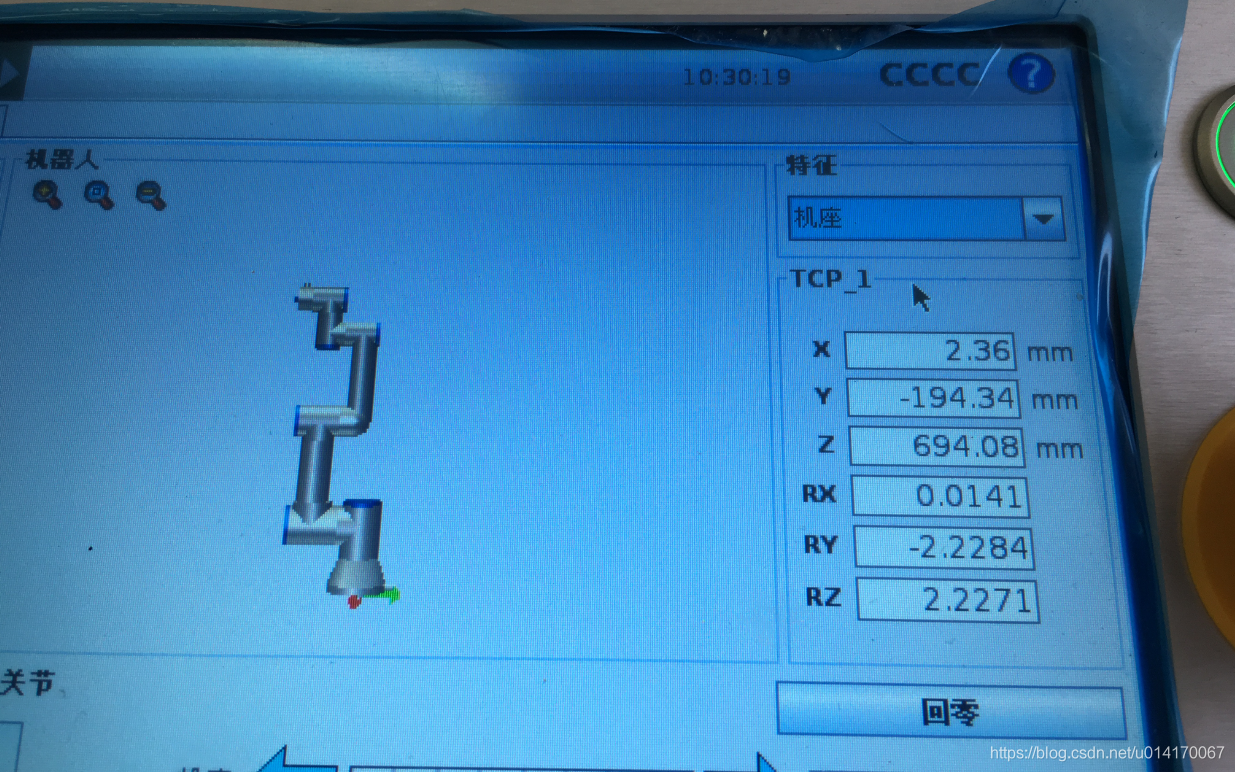
注意这里是实际值,与理论值相比有一些误差,比如理论值X=0,而实际可能不是0。这里的姿态描述方式使用的是旋转矢量法,见下一节。
二、UR机器人Pose的表示方式
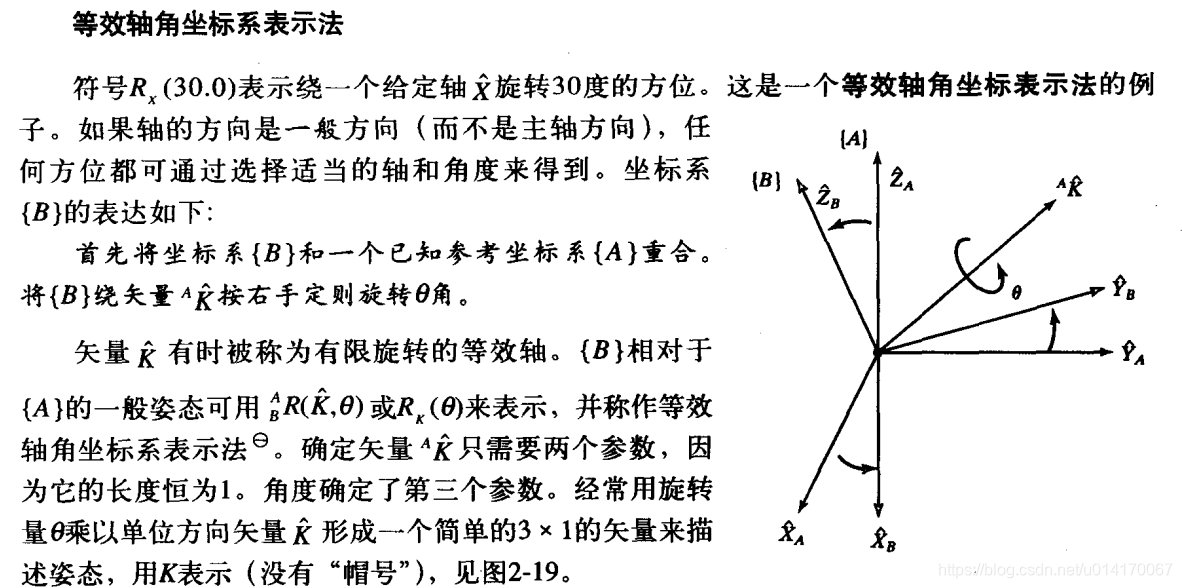
UR机器人的Pose表示的是TCP坐标系相对于基座标系的位置和姿态。一个坐标系相对于另一个坐标系的姿态的表示方法有很多种,比如:X-Y-Z固定角,Z-Y-X欧拉角,RPY角,四元数等。而UR机器人里面使用的是旋转矢量法。在介绍旋转矢量法之前先看一下等效轴角坐标系表示法。在《机器人学导论》中对等效轴角法有详细讲解,如下图所示,这种方法是用一个单位向量
:坐标系及位姿表示方法")
和一个转动角度θ来表示两个坐标系之间的旋转关系。具体介绍如下图所示:
而旋转矢量法用一个旋转矢量:
:坐标系及位姿表示方法")
来表示两个坐标系之间的旋转关系,其中旋转矢量法与等效轴角坐标系之间的关系是:Rx=θkx,Ry=θky,Rz=θkz。
由旋转矢量求旋转矩阵的方法可以按照如下公式:
:坐标系及位姿表示方法")
使用上述公式之前需要先求出θ和kx,ky,kz,求法如下:
:坐标系及位姿表示方法")
可以看出如果θ=0°或180°时,旋转轴根本无法确定,上式也将无解。这也是旋转矢量法的一个明显缺点。
反过来,如果已知旋转矩阵,可以通过如下公式求解等效轴角表示法,进而求出旋转矢量表示法:
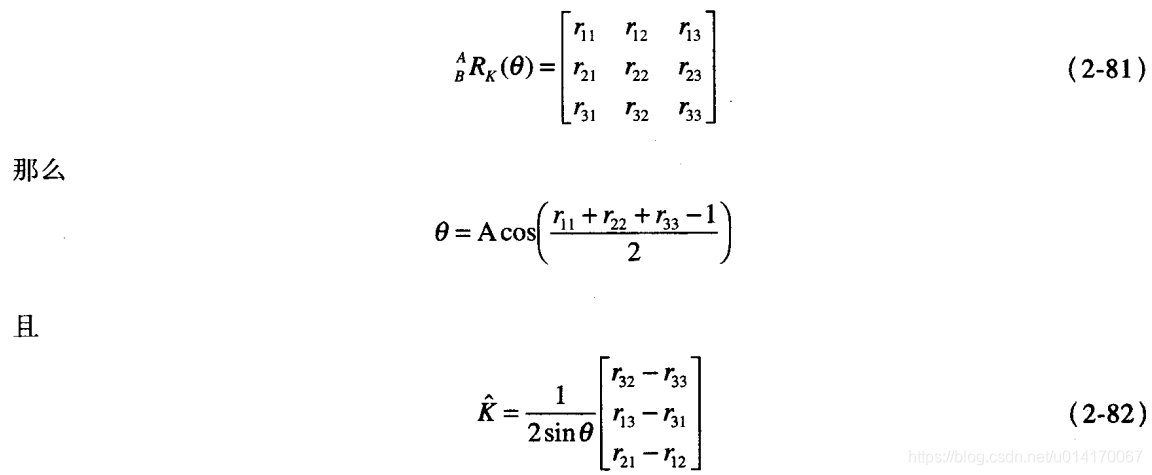
注意2-82中的r33应改为r23,这是书中的一处错误。
:坐标系及位姿表示方法")
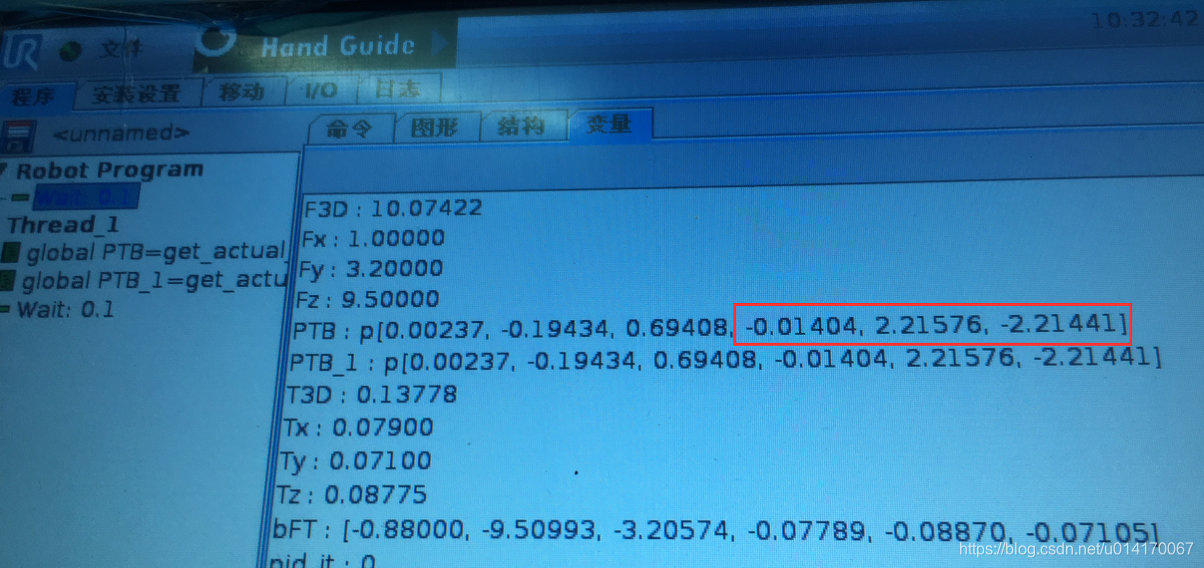
由以上叙述可以知道,对于同一姿态,旋转矩阵的表示不唯一。所以在UR机器人中,通过面板观察到的TCP Pose可能与通过脚本命令get_actual_tcp_pose()所得到的不一样,这是正常现象。如果不相信可以将它们都转换成RPY角就会发现,它们表示的是同一个姿态。特别是在零点位置时比较明显,如下面两个图所示,可以看出在面板上看到的Rx,Ry,Rz与通过脚本函数get_actual_tcp_pose()获得的TCP姿态不一样,但其实它们表示的是同种TCP姿态。
另外,UR提供了一个脚本函数rotvec2rpy(rotation_vector),可以将旋转矢量表示的姿态转换成rpy角表示的姿态,但是这里传递的参数是一个list:[Rx,Ry,Rz],而怎么把pose里的RX,RY,RZ分离出来传递个这个函数呢?很简单:
UR里面的pose是一种数据类型,假设pose=p[px,py,pz,Rx,Ry,Rz],那么list=[pose[3],pose[4],pose[5]],这样就可以把pose里表示姿态的[Rx,Ry,Rz]提取出来给到一个list里面。
还有一个pose_trans(p_from,p_from_to)函数,p_from表示坐标系B相对于A的pose,p_from_to表示坐标系C相对于B的pose,函数的返回值表示坐标系C相对于A的pose。pose与变换矩阵有一一对应的关系,用矩阵的方式理解这个函数就是:
:坐标系及位姿表示方法")




