通过视觉传感器赋予机械臂“眼睛”的功能,配合ATI力和力矩传感器,就可以完成机械臂“手眼”结合的能力,完成视觉抓取过程。目前测试的视觉传感器为 ZED mini双目相机,配置安装过程 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3480浏览 0评论777个赞
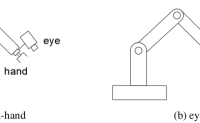
在我们进行机械臂抓取实验时候,总是少不了相机的标定环节。我认为相机标定可以分为两个部分。 一个部分是相机外参的标定,也就是获得相机坐标系与世界坐标系的关系,在我们的系统中,世界坐标系是可以自定义的。其中眼在手上的标定,不变的是相机与机械臂末端的坐标转换。通过手眼标定获得这两者的转……继续阅读 » 光头明明 5年前 (2021-04-26) 3186浏览 0评论588个赞
一,配置环境 硬件: UR5工业机器人 Kinect V2 软件: 注意我是将下面包安装在ros下工作目……继续阅读 » 光头明明 5年前 (2021-04-26) 3143浏览 0评论372个赞
描述C++求解AX = XB以下的两个代码,虽然可以直接运行,但是我本人使用它们得到的手眼矩阵,旋转矩阵R值的大小看起来是合理的,但位置向量t的三个数值大概都是大于10万的,显然是错误的。但没有时间去研究错误的原因,但是……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1604浏览 0评论439个赞
描述使用matlab求解AX=XB的问题可以正确求出X的值,我已经成功验证了至于说X具体代表什么,要结合你自己推导出的公式AX=XB之中,A、X、B分别代表什么代码main.……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2109浏览 0评论1299个赞
描述本文将简要介绍机械臂手眼标定原理及相关知识,包会基础知识了解手眼标定原理,就必须先了解一句话,叫做……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2020浏览 0评论2968个赞