一、简述
手眼标定目的在于实现物体在世界坐标系和机器人坐标系中的变换。
在标定时,一般在工作平面设置一个世界坐标系,该坐标系与机器人坐标系不重合,在完成相机的内外参标定后,可计算获得物体在世界坐标系中的位置。若需要机器人与视觉联动,需要获得物体在在机器人坐标系中的坐标。
二、实现步骤
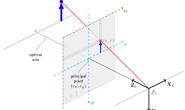
- 通过张正友法标定相机的内参矩阵和畸变参数;(相机标定(一)——内参标定与程序实现)
- 标定相机外参矩阵,用于图像坐标与世界坐标的转换;(相机标定(二)——图像坐标与世界坐标转换)
- 设置N个特征点(N>3),计算其世界坐标,移动机械臂工作末端到特征点,记录末端坐标,获得N组数据;
- 计算两组数据的R和t,其中特征点世界坐标为A组数据,末端坐标为B组数据;
备注:
计算两组数据的变换矩阵实际上为3D-3D的位姿估计问题,可用迭代最近点(Iterative Closest Point, ICP)求解,实现方法有两种:
- 利用线性代数的求解(主要是 SVD)(建议采用该方法)
- 利用非线性优化方式的求解(类似于 Bundle Adjustment)
更多ICP相关算法可参考:Calibration and Registration Techniques for Robotics的Registering Two Sets of 3DoF Data
三、SVD求解
3.1 原理
假设有两个点集AA AA和BB BB,且这两个点集合的元素数目相同且一一对应。为了寻找这两个点集之间的旋转矩阵RR RR和平移矩阵tt tt。可以将这个问题建模成如下的公式:
B=R∗A+t
求解步骤
- 计算点集合的中心点
- 将点集合移动到原点,计算最优旋转矩阵RR RR
- 计算转移矩阵tt tt
求解
1.旋转矩阵R
- 计算中心点
——手眼标定")
——手眼标定")
- 点集重新中心化
——手眼标定")
- 计算点集之间的协方差矩阵H
——手眼标定")
- 通过奇异值分解计算最优旋转矩阵
——手眼标定")
2.平移矩阵t
t=−R×μA+μB
3.2 补充知识
1.协方差
协方差(Covariance)是一种用来度量两个随机变量关系的统计量,定义为:
——手眼标定")
其中μA,μB分别为A,B的均值
2.奇异值分解(SVD,Singular Value Decomposition)
奇异值分解是一个能适用于任意的矩阵的一种分解的方法,公式为:
A=UΣVT
几何含义:对于任意一个矩阵,找到一组两两正交单位向量序列,使得矩阵作用在此向量序列上后得到新的向量序列保持两两正交。
3.3 程序实现
bool RtbySVDSrv( vector<Eigen::Vector3d> worldPoints, vector<Eigen::Vector3d> robotPoints,Eigen::Vector3d &t,Eigen::Matrix3d &R, Eigen::Quaterniond &q) {
// check data
if (worldPoints.size() != robotPoints.size() || worldPoints.size() < 3)
return false;
// save data
int size = worldPoints.size();
// count centre points
Eigen::Vector3d worldCentre, robotCentre;
for (int i = 0; i < size; i++) {
worldCentre += worldPoints[i];
robotCentre += robotPoints[i];
}
worldCentre /= size;
robotCentre /= size;
// count the vector
vector<Eigen::Vector3d> worldVectors(size), robotVectors(size);
for (int i = 0; i < size; i++) {
worldVectors[i] = worldPoints[i] - worldCentre;
robotVectors[i] = robotPoints[i] - robotCentre;
}
// count H
Eigen::Matrix3d H;
for (int i = 0; i < size; i++) {
H += worldVectors[i] * robotVectors[i].transpose();
}
// svd count R and Q
Eigen::JacobiSVD<Eigen::MatrixXd> svd(H, Eigen::ComputeThinU |
Eigen::ComputeThinV);
Eigen::Matrix3d V = svd.matrixV(), U = svd.matrixU();
R = V * U.transpose();
if (R.determinant() < 0)
R *= -1;
q = Eigen::Quaterniond(R);
q.normalize();
// count t
t = robotCentre - R * worldCentre;
return true;
}
四、非线性优化求解
非线性优化是以迭代的方式去找最优值(选取一组数据变换后与另外一组数据的差值为误差值),以李代数表达位姿时,目标函数可以写成:
——手眼标定")
ICP问题存在唯一解或无穷多解的情况。在唯一解的情况下,只要我们能找到极小值解,那么这个极小值就是全局最优值(因此不会遇到局部极小而非全局最小的情况)。这意味着ICP求解可以任意选定初始值。
注意:
ICP更常用于匹配未知的情况下,此处计算已知匹配点对存在解析解,可分别采用SVD或非线性优化计算,但没必要对SVD计算结果进行优化。
4.1 通过Ceres构建优化程序
Ceres可参考SLAM学习——Ceres
- 损失函数
使用四元数描述旋转并用于优化,优化维度为4个旋转,3个平移,误差维度为3。
注意:
欧拉角在描述旋转时存在万向锁的问题,若使用欧拉角描述旋转和用于优化,会在转换到变换矩阵进行旋转变换时产生错误。
struct ICP_COST {
ICP_COST(Point3f p1, Point3f p2) : _p1(p1), _p2(p2) {}
template <typename T>
bool operator()(const T *const q, const T *const t, T *residual) const {
// P2->P1
T p_21[3];
p_21[0] = T(_p2.x);
p_21[1] = T(_p2.y);
p_21[2] = T(_p2.z);
ceres::QuaternionRotatePoint(q, p_21, p_21);
p_21[0] += t[0];
p_21[1] += t[1];
p_21[2] += t[2];
// 误差
residual[0] = T(_p1.x) - p_21[0];
residual[1] = T(_p1.y) - p_21[1];
residual[2] = T(_p1.z) - p_21[2];
return true;
}
const Point3f _p1, _p2;
};
- BA优化
void bundleAdjustment(const vector<Point3f> &pts1, const vector<Point3f> &pts2,
Eigen::Quaterniond ceres_q, Eigen::Vector3d ceres_t) {
// 优化初始值,可以使用SVD获得值进行优化,或者直接使用0
double q[4] = {ceres_q.w(), ceres_q.x(), ceres_q.y(), ceres_q.z()};
double t[3] = {ceres_t[0], ceres_t[1], ceres_t[2]};
// 构造问题
ceres::Problem problem;
int len = pts1.size();
for (int i = 0; i < len; i++) {
problem.AddResidualBlock(new ceres::AutoDiffCostFunction<ICP_COST, 3, 4, 3>(
new ICP_COST(pts1[i], pts2[i])),
nullptr, q, t);
}
// 配置问题并求解
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR; // 配置增量方程的解法
options.minimizer_progress_to_stdout = true; // 输出到cout
ceres::Solver::Summary summary; // 优化信息
ceres::Solve(options, &problem, &summary); // 开始优化
// 输出结果
cout << summary.BriefReport() << endl;
Eigen::Matrix3d R_Martix = Quaternion2RotationMatrix(q[1], q[2], q[3], q[0]);
Eigen::Vector3d t_Martix = {t[0], t[1], t[2]};
cout << "R" << R_Martix << endl;
cout << "t" << t_Martix << endl;
// verify
for (int i = 0; i < 5; i++) {
cout << "p1 = " << pts1[i] << endl;
cout << "p2 = " << pts2[i] << endl;
Eigen::Vector3d point = {pts2[i].x, pts2[i].y, pts2[i].z};
cout << "p1_count = " << R_Martix * point + t_Martix << endl;
}
}
参考
Finding optimal rotation and translation between corresponding 3D points
《视觉SLAM十四讲》——第七讲 视觉里程计