小伙伴们大家好!相信有一些同学在接触到标定的时候被花式坐标系转换、矩阵公式、畸变搞得一头雾水,今天我就带大家直击原理难点,一举拿下手眼标定! 如果有小伙伴进行过标定的操作,一定还记得其中有一句话–“进行手眼标定前一定要先进行相机标定”。这是因为相机标定的目的主要是……继续阅读 » 小枫 5年前 (2021-04-26) 1735浏览 0评论2350个赞
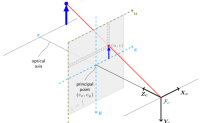
相机标定是用于获取相机畸变,内参数和外参数的一个操作,是机器视觉中不可或缺的一个重要步骤。 畸变是相机因其自身成像特性无法避免产生的图像变形。内参数是对相机内部特性的描述,包括相机图像中心、相机焦距等。外参数描述的是相机在世界坐……继续阅读 » white_Learner 5年前 (2021-04-26) 2293浏览 0评论1575个赞
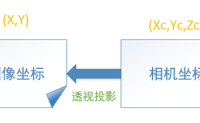
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » white_Learner 5年前 (2021-04-26) 3622浏览 0评论551个赞
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » white_Learner 5年前 (2021-04-26) 2967浏览 0评论1627个赞
相机标定(一)——内参标定与程序实现……继续阅读 » white_Learner 5年前 (2021-04-26) 1843浏览 0评论1540个赞
关于大佬们的一些见解 ……继续阅读 » 南山二毛 5年前 (2021-04-26) 2275浏览 0评论1686个赞
参考代码:https://github.com/christianwengert/calib_toolbox_addon<……继续阅读 » 南山二毛 5年前 (2021-04-26) 2921浏览 0评论1504个赞
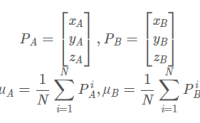
一、标定实现 机器人工具坐标系标定就是确定工具坐标系相对于末端连杆坐标系的变换矩阵 1.1 TCP位置标定 ……继续阅读 » white_Learner 5年前 (2021-04-26) 2555浏览 0评论1955个赞