前言 在环境感知与规划专题(一)——A*算法入门一……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2084浏览 0评论1365个赞
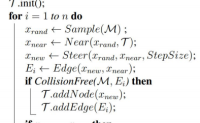
基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2919浏览 0评论340个赞
RRT路径规划算法地图RRT算法原理路径平滑处理总结RRT(Rapidly-Exploring Random Tree)算法是一种……继续阅读 » unique_jie 5年前 (2021-04-26) 1906浏览 0评论771个赞