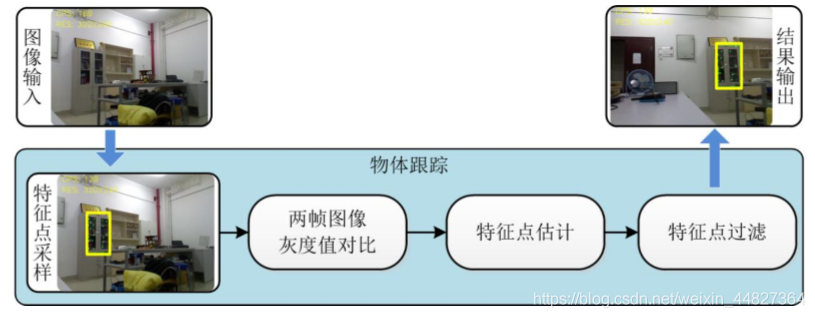
物体跟踪与物体识别有相似之处,同样使用特征点检测的方法,但侧重点并不相同。物体识别针对的物体可以是静态的或动态的,根据物体特征点建立的模型作为识别的数据依据;物体跟踪更强调对物体位置的准确定位,输入图像一般需要具有动态特性。 物体跟踪功能首先根据输入的图像流和选择跟踪的物体,采样物体在图像当前帧中的特征点;然后将当前帧和下一帧图像进行灰度值比较,估计出当前帧中跟踪物体的特征点在下一帧图像中的位置;再过滤位置不变的特征点,余下的点就是跟踪物体在第二帧图像中的特征点,其特征点集群即为跟踪物体的位置。该功能依然基于OpenCV提供的图像处理算法。
 机器视觉功能包下载地址,包含了摄像头标定、OpenCV、人脸识别、物体跟踪、二维码识别和物体识别等: //download.csdn.net/download/weixin_44827364/12147918 下面的代码在这个功能包里都有。 使用以下命令启动摄像头,然后运行motion_detector.launch文件启动物体跟踪例程:(下面有源码和分析) (下载本文所带功能包的情况下,下载地址在文首)也可以直接复制源码进行运行
机器视觉功能包下载地址,包含了摄像头标定、OpenCV、人脸识别、物体跟踪、二维码识别和物体识别等: //download.csdn.net/download/weixin_44827364/12147918 下面的代码在这个功能包里都有。 使用以下命令启动摄像头,然后运行motion_detector.launch文件启动物体跟踪例程:(下面有源码和分析) (下载本文所带功能包的情况下,下载地址在文首)也可以直接复制源码进行运行
$ roslaunch robot_vision usb_cam.launch
$ roslaunch robot_vision motion_detector.launch
**尽量选用纯色背景和色彩差异较大的测试物体。**在画面中移动识别物体,即可看到矩形框标识出了运动物体的实时位置,可以针对实验环境调整识别区域、阈值等参数。
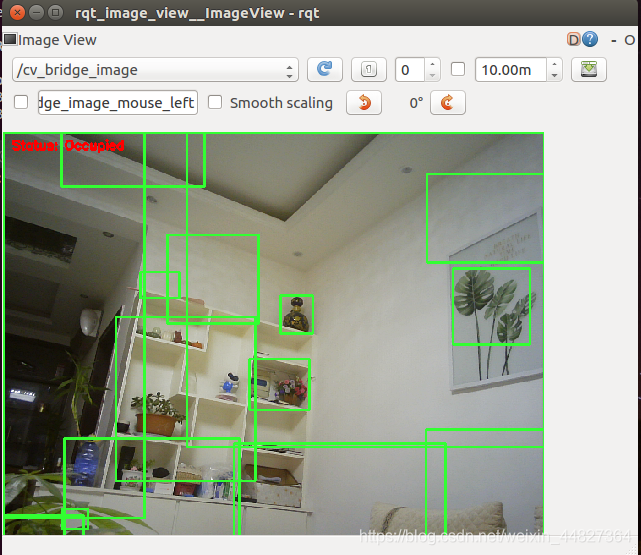 我只是晃动摄像头测试一下,特征点太多了…… motion_detector.py源码
我只是晃动摄像头测试一下,特征点太多了…… motion_detector.py源码
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import cv2
import numpy as np
from sensor_msgs.msg import Image, RegionOfInterest
from cv_bridge import CvBridge, CvBridgeError
class motionDetector:
def __init__(self):
rospy.on_shutdown(self.cleanup);
# 创建cv_bridge
self.bridge = CvBridge()
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
# 设置参数:最小区域、阈值
self.minArea = rospy.get_param("~minArea", 500)
self.threshold = rospy.get_param("~threshold", 25)
self.firstFrame = None
self.text = "Unoccupied"
# 初始化订阅rgb格式图像数据的订阅者,此处图像topic的话题名可以在launch文件中重映射
self.image_sub = rospy.Subscriber("input_rgb_image", Image, self.image_callback, queue_size=1)
def image_callback(self, data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
frame = np.array(cv_image, dtype=np.uint8)
except CvBridgeError, e:
print e
# 创建灰度图像
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
# 使用两帧图像做比较,检测移动物体的区域
if self.firstFrame is None:
self.firstFrame = gray
return
frameDelta = cv2.absdiff(self.firstFrame, gray)
thresh = cv2.threshold(frameDelta, self.threshold, 255, cv2.THRESH_BINARY)[1]
thresh = cv2.dilate(thresh, None, iterations=2)
binary, cnts, hierarchy= cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in cnts:
# 如果检测到的区域小于设置值,则忽略
if cv2.contourArea(c) < self.minArea:
continue
# 在输出画面上框出识别到的物体
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (50, 255, 50), 2)
self.text = "Occupied"
# 在输出画面上打当前状态和时间戳信息
cv2.putText(frame, "Status: {}".format(self.text), (10, 20),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
# 将识别后的图像转换成ROS消息并发布
self.image_pub.publish(self.bridge.cv2_to_imgmsg(frame, "bgr8"))
def cleanup(self):
print "Shutting down vision node."
cv2.destroyAllWindows()
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("motion_detector")
rospy.loginfo("motion_detector node is started...")
rospy.loginfo("Please subscribe the ROS image.")
motionDetector()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down motion detector node."
cv2.destroyAllWindows()




