ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是ROS中只允许存在一个Master,在多机系统中Master只能运行在一台机器上,其他机器需要通过ssh的方式和Master取得联系。所以在多机ROS系统中需要进行一些配置。 我们以两台计算机为例,介绍分布式多机通信的配置步骤,其中计算机ubuntu作为主机运行Master,计算机shibopi-desktop作为从机运行节点。 我的Ubuntu用的是ubuntu 16.04LTS, shibopi-desktop用的是ubuntu mate16.04,所以下面两者的颜色和界面有所差异。
设置IP地址
首先需要确定ROS多机系统中的所有计算机处于同一网络,然后分别在计算机ubuntu、shibopi-desktop上使用ifconfig命令查看计算机的局域网IP地址 为了防止每次开机分配的IP地址变化,这里建议为俩机分配固定IP,一劳永逸,下面我使用的这两个IP是我分配好的。 ubuntu:192.168.8.88 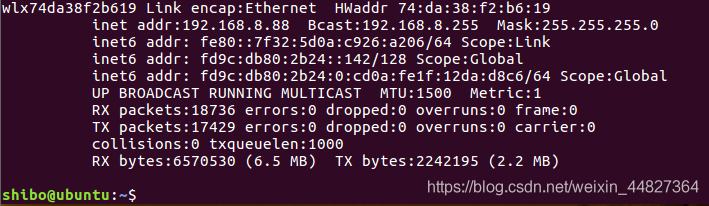 shibopi-desktop:192.168.8.197
shibopi-desktop:192.168.8.197 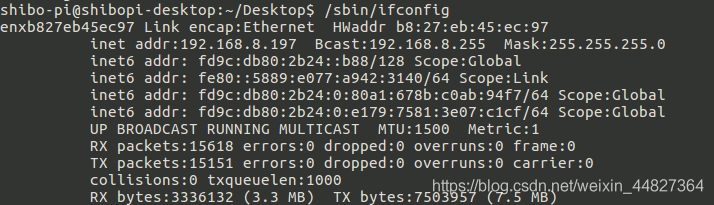 分别在两台计算机系统的/etc/hosts文件中加入对方的IP地址和对应的计算机名: 再ubuntu上:
分别在两台计算机系统的/etc/hosts文件中加入对方的IP地址和对应的计算机名: 再ubuntu上:
$ sudo gedit /etc/hosts
打开后添加一行:
192.168.8.197 shibopi-desktop
在shibopi-desktop上:
<span style="font-size: 16px;"><code class="prism language-bash has-numbering">$ <span class="token function">sudo</span> gedit /etc/hosts </code></span>
打开后添加一行:
192.168.8.88 ubuntu
设置完毕后,分别在两台计算机上使用ping命令测试网络是否连通 
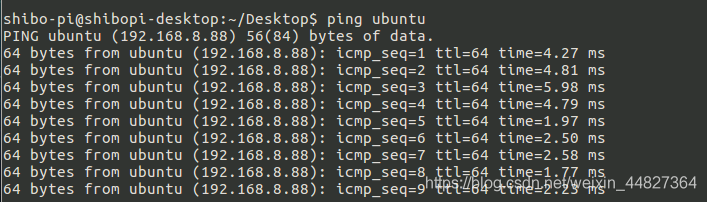 如果双向网络都畅通,就说明底层网络的通信已经没问题,接下来设置ROS相关的环境变量。 因为树莓派3B+的运算能力有限,我会把ros master和图形化工具都在电脑上面运行
如果双向网络都畅通,就说明底层网络的通信已经没问题,接下来设置ROS相关的环境变量。 因为树莓派3B+的运算能力有限,我会把ros master和图形化工具都在电脑上面运行
设置ROS_MASTER_URI
因为系统中只能存在一个Master,所以从机shibopi-desktop需要知道Master的位置。ROS Master的位置可以使用环境变量ROS_MASTER_URI进行定义,在从机shibopi-desktop上使用如下命令设置ROS_MASTER_URI:
<span style="font-size: 16px;"><code class="prism language-bash has-numbering">$ <span class="token function">export</span> ROS_MASTER_URI<span class="token operator">=</span>http:/ubuntu:11311 </code></span>
但是以上设置只能在输入的终端中生效,为了让所有打开的终端都能识别,最好使用如下命令将环境变量的设置加入终端的配置文件中。
<span style="font-size: 16px;"><code class="prism language-bash has-numbering">$ <span class="token keyword">echo</span> <span class="token string">"export ROS_MASTER_URI=http://ubuntu:11311"</span> <span class="token operator">>></span> ~/.bzshrc </code></span>
多机通信测试
现在ROS多机系统已经配置完成,下面使用小乌龟例程进行测试。 首先在主机ubuntu上运行小乌龟的仿真器:
<span style="font-size: 16px;"><code class="prism language-bash has-numbering">$ roscore $ rosrun turtlesim turtlesim_node </code></span>
然后在从机shibopi-desktop上使用“rostopic list”命令查看ROS系统中的话题列表 (下面的arduino话题是我控制小车的) 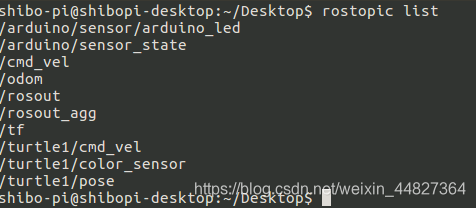 可以看到,现在从机已经可以与Master取得联系。在从机shibopi-desktop上发布一只小乌龟的速度控制消息:
可以看到,现在从机已经可以与Master取得联系。在从机shibopi-desktop上发布一只小乌龟的速度控制消息:
<span style="font-size: 16px;"><code class="prism language-bash has-numbering">$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist <span class="token string">"linear: x: 0.5 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.5" </span></code></span>
此时,主机ubuntu中的小乌龟应该就开始移动了,ROS多机系统配置成功。 在实际应用中,可能需要使用两个以上的计算平台,可以使用相同的方法进行配置,主机运行Master,其他从机通过设置ROS_MASTER_URI环境变量确定Master位置即可。 推荐: 为了方便连接我们的树莓派机器人,建议买一块微型路由器,我用的是这一款:GL.iNet 在某宝和某东都能买得到,体积很小巧,可以直接放在机器人上。 当然也可以让树莓派发出热点我们连接,我只是觉得用这个小路由器很方便,可以中继其他wifi,让我们连着它下载东西很方便,树莓派热点的话下载东西很麻烦。  PS: 编辑时有显示屏像这样很方便:(但是还需要外界外接键盘鼠标)
PS: 编辑时有显示屏像这样很方便:(但是还需要外界外接键盘鼠标)  不想用显示屏可以看我这篇博客: 使用xrdp远程连接树莓派Ubuntu mate系统
不想用显示屏可以看我这篇博客: 使用xrdp远程连接树莓派Ubuntu mate系统 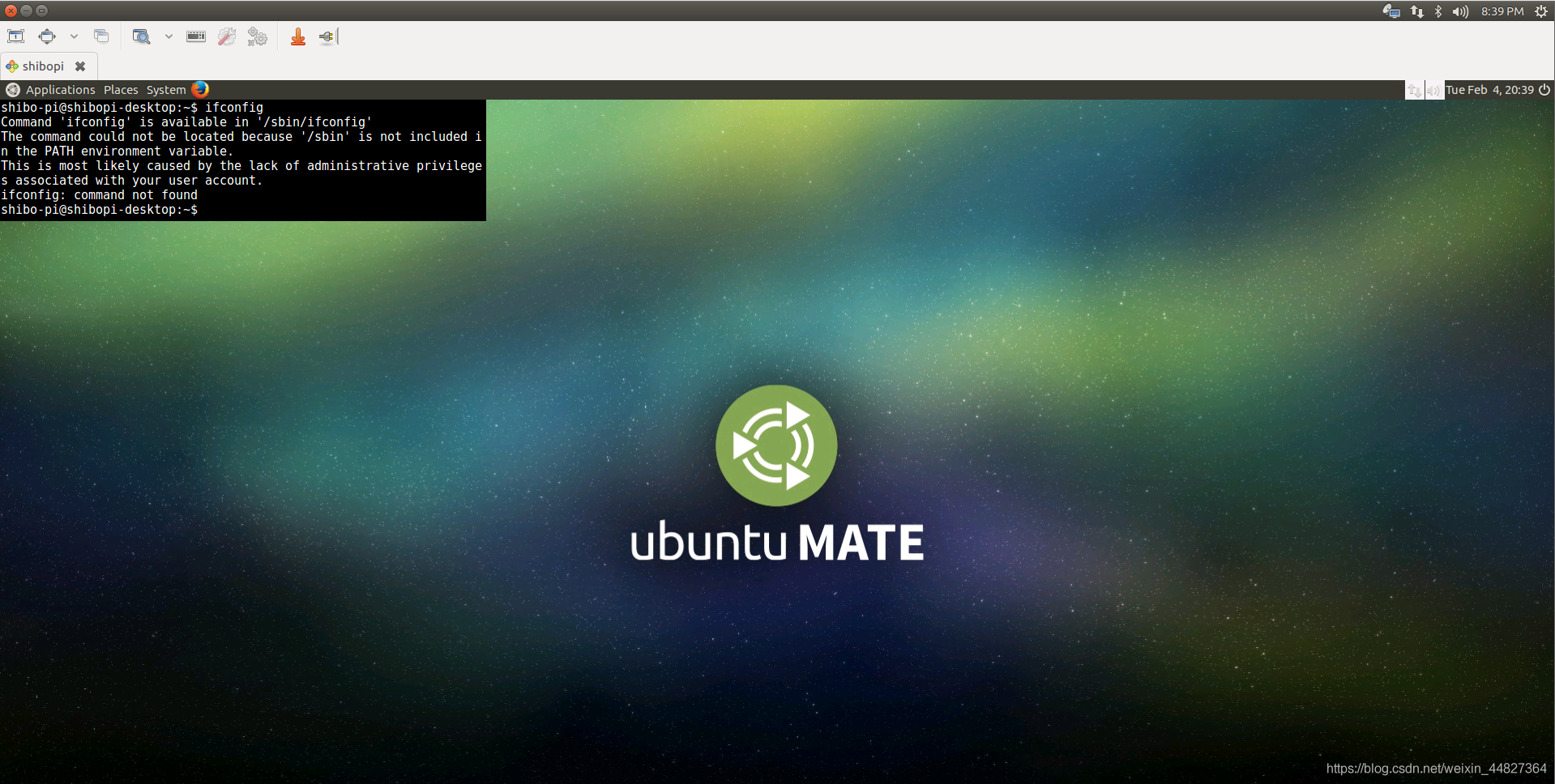 如果没有屏幕的情况下想直接开机进入桌面: 修改/etc/lightdm 下的lightdm.conf文件 如果没有则自己创建一个 内容为:(name是你电脑的用户名)
如果没有屏幕的情况下想直接开机进入桌面: 修改/etc/lightdm 下的lightdm.conf文件 如果没有则自己创建一个 内容为:(name是你电脑的用户名)
<span style="font-size: 16px;"><code class="prism language-cpp has-numbering">[SeatDefaults] autologin<span class="token operator">-</span>user<span class="token operator">=</span>name </code></span>




