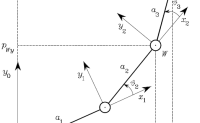
人工智能机器人学回炉重造(1-2):各种典型机械臂的正运动学建模(标准D-H法) 写在前面 本文所有机械臂均采用标准D-H建模法,该方法的建立过程可参考机器人学回炉重造(1):正运动学、标准D-H法与改进D……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 4075浏览 0评论2071个赞