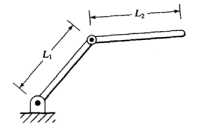
紧接着上一篇三连杆机械臂正运动学,今天我们聊一聊逆运动学的知识。机械臂逆运动学的问题描述是:已知工具坐标系相对于工作台坐标系的期望位置和姿态,如何计算一系列满足期望要求的关节角?<……继续阅读 » 王谦牧 5年前 (2021-04-26) 3088浏览 0评论2143个赞
本文转载自微信公众号ROBOTICS 复习 ROBOTICS的机器人学干货系列已经写到第八篇……继续阅读 » oCCo 5年前 (2021-04-26) 2009浏览 0评论628个赞
本文转载自微信公众号ROBOTICS 逆运动学,就是从操作空间的end effector position and orientation,求关节空间的joint posit……继续阅读 » oCCo 5年前 (2021-04-26) 1807浏览 0评论1385个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 3090浏览 0评论403个赞