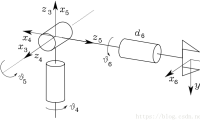
人工智能【机器人学】机械臂球形手腕的逆解 如图1所示的球形手腕(三个关节的轴线相交于一点)是常用的机械臂结构,我们希望在已知坐标系3至坐标系6的旋转矩阵的条件下求解3个关节值……继续阅读 » gpeng832 5年前 (2021-04-26) 1787浏览 0评论1665个赞