前言 上一章介绍了一种高效、实时的运动规划算法——JerkLimitedTrajectory(JLT)。 在给定起始状态与终止状态后,该算法能够快速地计算出一条符合三阶积分器动力学模型的运动轨迹。其适用于类似多旋翼无人机的对象,能够解……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1706浏览 0评论506个赞
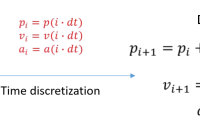
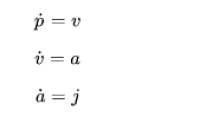
前言 上一篇中简述了模型预测控制在多旋翼飞行器运动规划中的应用。 本篇将针对采用线性MPC的多旋翼飞行器的运动规划方案进行详细推导。 系统模型的离散化 对于多旋翼飞行器这类三阶积分器模型……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2296浏览 0评论2301个赞