原理:
注意:这里使用迷你版,其他版本IO口设置不同,详细请查询原理图
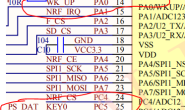
 由图可知:LED0是PA8,LED1是PD2,且都是共阳极,高电平灭,低电平亮 所以只需要控制这两个IO口的电平就能实现LED灯的闪烁了。 GPIO口设置前要先进行时钟的使能!!! (外设,包括GPIO使用前都要先使能相应的时钟!!) 同时设置为推挽输出(可以准确输出高低电平) 还要设置输出速度。 由于STM32都是使用相应的底层,所以要记住以下几个函数:
由图可知:LED0是PA8,LED1是PD2,且都是共阳极,高电平灭,低电平亮 所以只需要控制这两个IO口的电平就能实现LED灯的闪烁了。 GPIO口设置前要先进行时钟的使能!!! (外设,包括GPIO使用前都要先使能相应的时钟!!) 同时设置为推挽输出(可以准确输出高低电平) 还要设置输出速度。 由于STM32都是使用相应的底层,所以要记住以下几个函数:
- 1个初始化函数
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
- 2个读取输入电平函数
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
- 4个设置输出电平函数
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
主要代码:
main.c
******************************************************************************
* 文件名:LED灯
* 描 述:L1,L2每隔500ms闪烁一次
* 作 者:思索与猫
* 日 期: 19/4/1
* 备 注:
*
******************************************************************************
#include "stm32f10x.h" // Device header
#include "led.h"
#include "delay.h"
int main()
{
delay_init(); //延时函数初始化
LED_Init(); //LED灯初始化
while(1)
{
GPIO_SetBits(GPIOA,GPIO_Pin_8); //PA8,PD2高电平,L0,L1灭
GPIO_SetBits(GPIOD,GPIO_Pin_2);
//下方代码为更简单的对位操作IO口,实现LED灯亮灭
// PAout(8) = 1;
// PDout(2) = 1;
delay_ms(500); //延时500ms
GPIO_ResetBits(GPIOA,GPIO_Pin_8); //PA8,PD2低电平,L0,L1亮
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
// PAout(8) = 0;
// PDout(2) = 0;
delay_ms(500);
}
}
led.h
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
#endif
led.c
#include<led.h>
#include<stm32f10x.h>
void LED_Init()
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD,ENABLE);
//PA,PD时钟使能,这里使用了或运算
//定义PA8 GPIO口设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //设置引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化GPIO口
GPIO_SetBits(GPIOA,GPIO_Pin_8); //PA8输出高电平,L0灭
//定义PD2 GPIO口设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //设置引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度
GPIO_Init(GPIOD,&GPIO_InitStructure); //初始化GPIO口
GPIO_SetBits(GPIOD,GPIO_Pin_2); //PD2输出高电平,L1灭
}