前言 状态估计与控制是机器人学中两个避不开的问题,对于无人机而言亦是如此。如何在理解无人机模型的基础上,利用传感器信息,尽可能准确地估计一组完整描述它随时间运动的物理量,如位置、速度、加速度、角度、角速度等……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2268浏览 0评论1321个赞
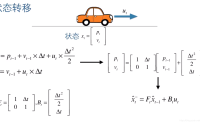
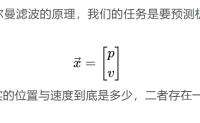
基本概念:1、状态方程: 某一时刻的状态用Xt表示,它是一个列向量,表征了当前位置Pt和当前速……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3203浏览 0评论1244个赞
英文原文链接:http://www.bzarg.com/p/how-a-ka……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2110浏览 0评论145个赞