前言 导航系统作为无人机的感知单元,承担着无人机状态参量测量与估计的重任。对于多旋翼无人机而言,其姿态、加速度、速度、位置以及各传感器的零偏与补偿系数均需要被测量或估计。这些众多参量之中只有极少一部分能够被直接或间接测量,大多数参数需要我们采用多个传感……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2031浏览 0评论381个赞
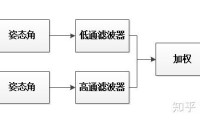
前言 上一篇中详细阐述了多旋翼飞行器导航系统中使用的主要传感器及其特性,本篇将着重介绍导航系统设计中常用的两种算法——互补滤波算法与卡尔曼滤波算法。同时,阐述一种多旋翼飞行器导航系统的设计方案。 互补滤波算法简介 互补滤波器的主……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1632浏览 0评论924个赞
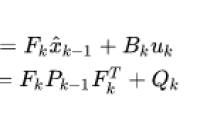
前言 扩展卡尔曼滤波(EKF)是多旋翼飞行器导航系统设计中,最常用的最优估计算法之一。其原理是在卡尔曼滤波的基础上,对非线性模型进行线性化,再进行最优估计,因此,其核心算法原理与卡尔曼滤波算法相似。本篇将围绕卡尔曼滤波展开 ,阐述其核……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2750浏览 0评论1718个赞
前言 上一篇中围绕一个简单的匀速直线运动的状态估计仿真实例展开,阐述了卡尔曼滤波器的实现方式、过程以及仿真效果。本篇将对卡尔曼滤波的几个主要参数的选取作一定的说明,同时,围绕扩展卡尔曼滤波算法展开,阐述其与卡尔曼滤波器的区别与作用。 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2892浏览 0评论603个赞