……继续阅读 » 古月 5年前 (2021-04-26) 2410浏览 0评论2750个赞
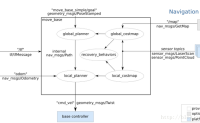
ROS中的二维导航功能包,简单来说,就是根据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令,然而,其自带的导航算法并不是适用所有的机器人和环境,在实际应用中我们经常需要更换导航算法来使机器人更能适应它所处的环境。……继续阅读 » Judez 5年前 (2021-04-26) 3278浏览 0评论2299个赞
Movebase的源码安装 Movebase源码位于Navigation包中,大家可在……继续阅读 » RedGlass 5年前 (2021-04-26) 3393浏览 0评论2278个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » windSeS 5年前 (2021-04-26) 2909浏览 0评论182个赞