人工智能gazebo-ros教程(一)ros_control 在本教程中,我们将通过模拟控制器来驱动机器人的关节。这将使我们能够为MoveIt等规划器提供正确的ROS接口!。我们将使用ros_control软件包。 与ros……继续阅读 » 我是。 5年前 (2021-04-26) 3264浏览 0评论2810个赞
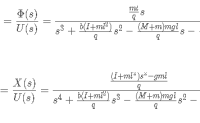
人工智能Matlab 仿真——单自由度倒立摆(2)系统分析 文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 2650浏览 0评论1733个赞