18cm三轮摄像头图像处理
- 前言
- 比赛规则
- 设备简述
- 一、扫线方式(八领域)
- 1.寻找赛道
- 1)种子寻找
- 2)八领域寻线
- 3)在边界中提取边线[^1]
- 4)计算中值
- 2.赛道信息提取
- 1)边界生长方向信息
- 2)拐点的寻找
- ①直角型拐点
- ②圆弧形拐点
- 3)边界的方差(或绝对值)计算
- 4)边界的斜率
- 二、赛道元素判断及处理
- 1.十字元素
- 正入十字
- 1)判断条件
- 2)拉线处理
- 斜入十字(举一种情况)
- 1)判断条件
- 2)拉线处理
- 2.环岛元素
- 1)判断条件
- 2)拉线处理
- 3.车库元素
- 入车库
- 1)判断条件
- 2)拉线处理
- 出车库
- 1)判断条件
- 2)拉线处理(以右出库为例)
- 4.坡道元素
- 1)判断条件
- 2)状态判断
- 3)拉线处理
- 5.会车
- 1)判断条件
- 2)拉线处理
- 6.弯道
- 1)小弯道
- 2)大弯道
- 7.长直道
- 三、反光判断
- 四、结语
前言
或许是有幸,参加了第十五届智能车竞赛,在这一年里,经历了很多,少有满意,认识了很多人,感谢相识。 比赛将要结束,我也将离智能车越来越远。但毕竟也曾热爱、付出过,希望能把我的一些经验写下来,至少留下一个痕迹,也能给一些准备比赛或像参加比赛的选手提供一些帮助。
比赛规则
第十五届全国大学生智能汽车竞赛竞速赛规则 可能由于疫情原因,比赛不仅提前了,而且准备时间还相比之前减少了很多,因此第十五届智能车竞速赛的赛道元素相比去年删去了一些,而仅仅新加了一个车库元素。因此,在图像方面,负担减轻了很多。
设备简述
F车 130°普通无畸变摄像头 摄像头镜面中心高度18.5cm 前瞻2.5-3m
一、扫线方式(八领域)
感谢聪聪在八领域方面的帮助@zcc 八领域实现原理在网上可以很容易找到,不再赘述。 主要讲一讲我是如何使用八领域的。
1.寻找赛道
1)种子寻找
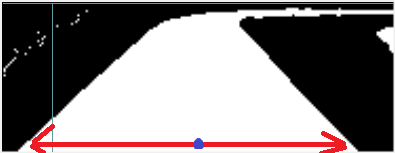 定一个底行初始位置,从中间分别向两边寻找边线的种子
定一个底行初始位置,从中间分别向两边寻找边线的种子
2)八领域寻线
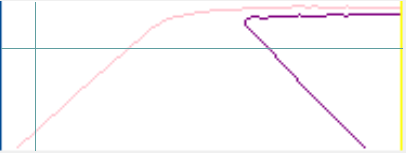 利用八领域,由种子生长出整条边界
利用八领域,由种子生长出整条边界
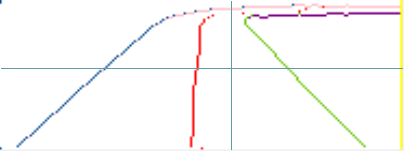
3)在边界中提取边线1
通过遍历八领域得到的连续边界,提取出用于计算中值的边线。  图中,左边蓝线与右边绿线为每行的边线,下图为分离图
图中,左边蓝线与右边绿线为每行的边线,下图为分离图 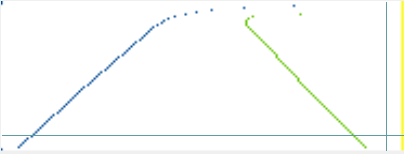
4)计算中值
2.赛道信息提取
1)边界生长方向信息
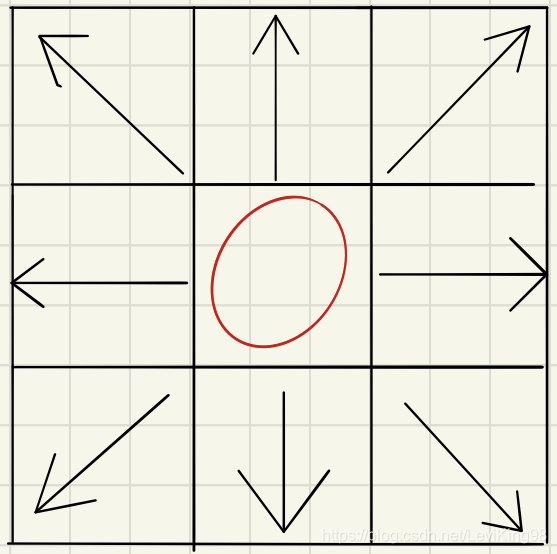 可以把领域的生长方向记录下来,作为边界的特征之一
可以把领域的生长方向记录下来,作为边界的特征之一
2)拐点的寻找
①直角型拐点
直角型拐点的特征较为明显,边界在直角的顶点会急剧转向接近90°的另一个方向,常出现在十字中。 拿十字举例 二值图: 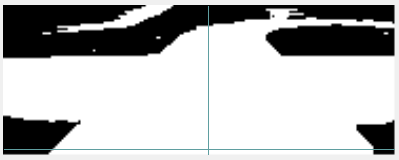 边界:
边界: 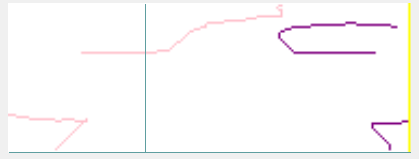 可以通过边界生长方向的变化来寻找
可以通过边界生长方向的变化来寻找 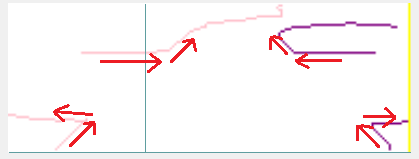 或者通过斜率的突变来寻找
或者通过斜率的突变来寻找 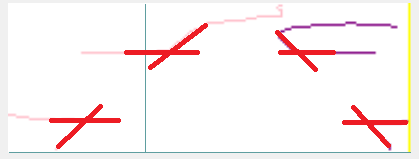
②圆弧形拐点
因为赛道弯曲形成的拐点,回拐的程度较小,常出现在弯道或环岛中。 拿小弯举例 二值图:  边界:
边界: 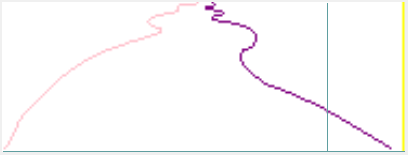 拐点:
拐点:  拐点出现在边界像素点横坐标的局部极大值或极小值处。
拐点出现在边界像素点横坐标的局部极大值或极小值处。
3)边界的方差(或绝对值)计算
①最小二乘法 这里使用最简单的拟合一次函数曲线的最小二乘法,网上很多教程与实例,不再赘述。 ②用最小二乘法拟合出的直线计算与边界像素点的方差(或绝对值) 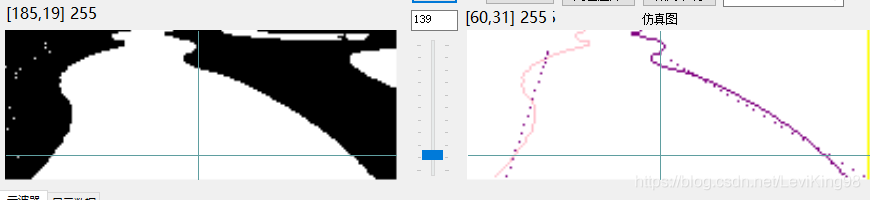 如图所示,可以直观看出像素点偏移直线程度。
如图所示,可以直观看出像素点偏移直线程度。
4)边界的斜率
由最小二乘法得到的一次函数得到边界的总体斜率
二、赛道元素判断及处理
1.十字元素
正入十字
1)判断条件
二值图: 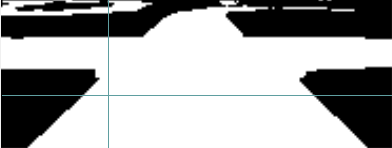 边界图:
边界图: 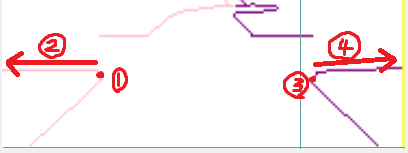 ①找到左前拐点 ②左边线向左横向生长像素点较多 ③找到右前拐点 ④右边线向右横向生长像素点较多
①找到左前拐点 ②左边线向左横向生长像素点较多 ③找到右前拐点 ④右边线向右横向生长像素点较多
2)拉线处理
①十字前 分别将左右前后两个拐点相连  ②十字中 找到两个后拐点,利用最小二乘法前拉边线
②十字中 找到两个后拐点,利用最小二乘法前拉边线 
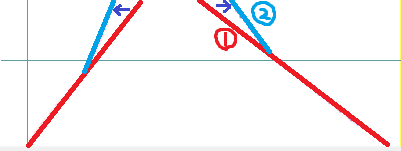
斜入十字(举一种情况)
1)判断条件
二值图: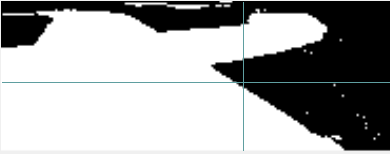 边界图:
边界图: 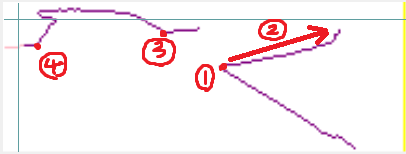 ①找到右前拐点 ②右前边界向右横向生长的点数较多 ③找到右后拐点 ④找到左后拐点
①找到右前拐点 ②右前边界向右横向生长的点数较多 ③找到右后拐点 ④找到左后拐点
2)拉线处理
①将右边两个拐点相连 ②利用最小二乘法前拉左后拐点高行的直线 
2.环岛元素
1)判断条件
以左环岛为例 二值图:  边界:
边界: 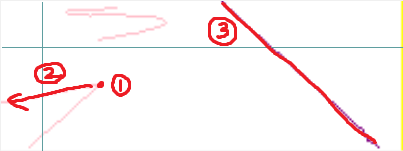 ①左拐点 ②左前边线横向生长的点较多 ③右边界从底行到高行为直线,方差很小 判断条件较为简单,如果不放心,可以再提取左上圆环特征
①左拐点 ②左前边线横向生长的点较多 ③右边界从底行到高行为直线,方差很小 判断条件较为简单,如果不放心,可以再提取左上圆环特征
2)拉线处理
整个环岛处理为一个状态机,大致拉线如下: ①左前直角型拐点与左后圆弧形拐点相连  ②左后圆弧形拐点拉线
②左后圆弧形拐点拉线  ③入环拐点拉到右边低行
③入环拐点拉到右边低行  ④环内正常边线
④环内正常边线  ⑤开始出环先拉右线
⑤开始出环先拉右线  ⑥左后拐点与左前边线起始处相连
⑥左后拐点与左前边线起始处相连  ⑦二乘法将左后拐点拟线前拉
⑦二乘法将左后拐点拟线前拉 
3.车库元素
入车库
1)判断条件
二值图:  边界图:
边界图:  ①找到左前拐点 ②右边界为直线,方差较小 ③扫到斑马线 ④横向生长的点数较多(或左前拐点后的边界斜率很小很小)
①找到左前拐点 ②右边界为直线,方差较小 ③扫到斑马线 ④横向生长的点数较多(或左前拐点后的边界斜率很小很小)
2)拉线处理
①将左后拐点拉到左前拐点纵坐标位置的右边线  ②将左后边线的起始位置拉到右下角
②将左后边线的起始位置拉到右下角  ③当左后拐点小于一定行数,利用最小二乘法将左后拐点的线拟合到右下角
③当左后拐点小于一定行数,利用最小二乘法将左后拐点的线拟合到右下角  ④进入车库,正常扫线
④进入车库,正常扫线 

出车库
1)判断条件
无需判断,手动预设
2)拉线处理(以右出库为例)
①在库内,拉直线  ②左前拐点小于某行或丢失,开始拉线
②左前拐点小于某行或丢失,开始拉线  ③避开斑马线进行扫线,直接拉到左下角
③避开斑马线进行扫线,直接拉到左下角  ④出库基本完成,正常扫线
④出库基本完成,正常扫线 
4.坡道元素
二值图:  边线图:
边线图: 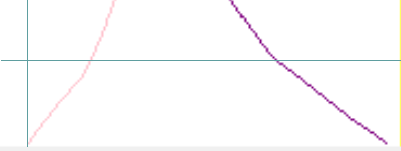
1)判断条件
 ①高行行间距变小 ②高行与低行都是直线,方差很小
①高行行间距变小 ②高行与低行都是直线,方差很小
2)状态判断
①上坡前,边线延伸至顶行,行间距较大  ②上坡时,边线顶端只能够到达中间行
②上坡时,边线顶端只能够到达中间行  ③下坡时,边线又延伸至顶端,高行行间距变小
③下坡时,边线又延伸至顶端,高行行间距变小  ④下到坡底,行间距变宽
④下到坡底,行间距变宽  ⑤坡道结束,回到正常赛道
⑤坡道结束,回到正常赛道 
3)拉线处理
①在坡顶时,只处理低行中线,减少因坡顶的视野太远导致的误扫边界的影响  ②其他时候正常扫线
②其他时候正常扫线
5.会车
1)判断条件
二值图:  边界图:
边界图:  在道路中间由下往上找种子,找到后车车模并扫线
在道路中间由下往上找种子,找到后车车模并扫线  ①找到车的四个拐点
①找到车的四个拐点  ②拐点前后边界的生长特征
②拐点前后边界的生长特征 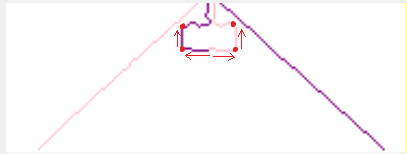 ③两个前拐点之间的距离符合正常后车长度
③两个前拐点之间的距离符合正常后车长度 
2)拉线处理
①将两个拐点中间的像素点作为后车中点  ②将中点与最低行中点拉线
②将中点与最低行中点拉线 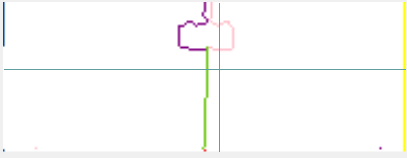
6.弯道
1)小弯道
①多处圆弧型拐点 ②边界存在一定的方差 ③边界的斜率一定范围内 
2)大弯道
①一处圆弧拐点 ②边线方差较大 ③边界的斜率超出一定范围 
7.长直道
①不存在圆弧拐点 ②边线方差很小 ③边界的斜率稳定在很小范围之内 
三、反光判断
利用生长方向的异常来判断是否反光 二值图:  边界:
边界: 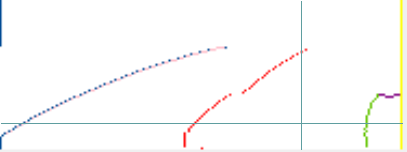 可以看到左边界尽头突然急剧折返,可以认为异常,判断为反光,停止扫线,减少一些误判或增强图像在反光时的鲁棒性。
可以看到左边界尽头突然急剧折返,可以认为异常,判断为反光,停止扫线,减少一些误判或增强图像在反光时的鲁棒性。
四、结语
智能车让我学到了很多
- 边界为八领域生长出的连续像素点,边线为每行一个的离散像素点 ↩︎




