在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统。
1 tf简介
1.1 什么是tf
tf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数据结构,根据时间缓冲并维护多个参考系之间的坐标变换关系,可以帮助用户在任意时间,将点、向量等数据的坐标,在两个参考系中完成坐标变换。
tf的相关设计思想,可以参见:tf设计
——重读tf")
1.2 tf可以做什么
一个机器人系统通常有很多三维的参考系,而且会随着时间的推移发生变化,例如全局参考系(world frame),机器人中心参考系(base frame),机械夹参考系(gripper frame),机器人头参考系(head frame)等等。tf可以以时间为轴,跟踪这些参考系(默认是10秒之内的),并且允许用户提出如下的申请:
- 五秒钟之前,机器人头参考系相对于全局参考系的关系是什么样的?
- 机器人夹取的物体相对于机器人中心参考系的位置在哪里?
- 机器人中心参考系相对于全局参考系的位置在哪里?
tf可以在分布式系统中进行操作,也就是说一个机器人系统中所有的参考系变换关系,对于所有节点组件,都是可用的,所有订阅tf消息的节点都会缓冲一份所有参考系的变换关系数据,所以这种结构不需要中心服务器来存储任何数据。
1.3 tf的使用流程
想要使用tf功能包,总体来讲可以分为以下两个步骤:
(1) 监听tf变换
接收并缓存系统中发布的所有参考系变换,并从中查询所需要的参考系变换。
(2) 广播tf变换
向系统中广播参考系之间的坐标变换关系。系统中更可能会存在多个不同部分的tf变换广播,每个广播都可以直接将参考系变换关系直接插入tf树中,不需要再进行同步。
2 tf实例理解
3 tf基础教程
4 tf功能包的API说明
5 命令行工具
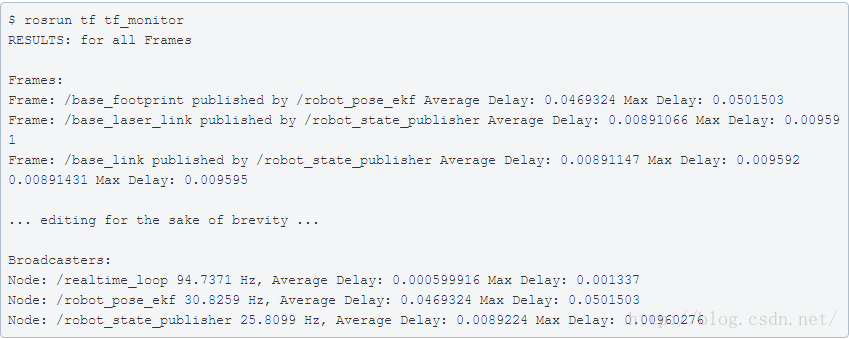
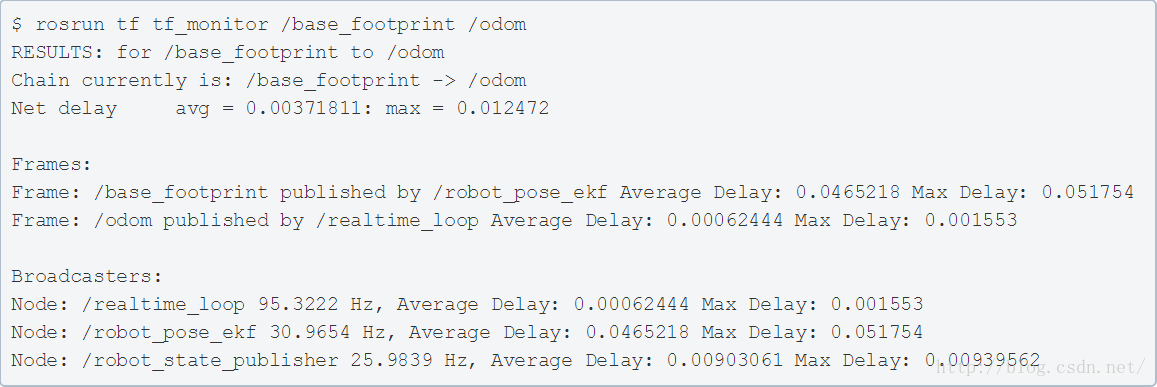
5.1 tf_monitor
tf_monitor工具的功能是打印tf树中的所有参考系信息,通过输入参数来查看指定参考系之间的信息。
命令格式如下:
- tf_monitor
- tf_monitor <source_frame> <target_target>
示例结果如下图所示:
5.2 tf_echo
tf_echo工具的功能是查看指定参考系之间的变换关系。
命令的格式如下:
- tf_echo <source_frame> <target_frame>
示例效果如下图所示:

5.3 static_transform_publisher
static_transform_publisher工具的功能是发布两个参考系之间的静态坐标变换,两个参考系一般不发生相对位置变化。
命令的格式如下:
- static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
- static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
以上两种命令格式,需要设置坐标的偏移和旋转参数,偏移参数都使用相对于xyz三轴的坐标位移,而旋转参数第一种命令格式使用以弧度为单位的 yaw/pitch/roll三个角度(yaw是围绕x轴旋转的偏航角,pitch是围绕y轴旋转的俯仰角,roll是围绕z轴旋转的翻滚角),而第二种命令格式使用四元数表达旋转角度。发布频率以ms为单位,一般100ms比较合适。
该命令不仅可以在终端中使用,还可以在launch文件中使用,使用方式如下:
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1 100" />
</launch>
5.4 view_frames
view_frames 是可视化的调试工具,可以生成pdf文件,来显示整棵tf树的信息。
命令行的执行方式如下:
$ rosrun tf view_frames
$ evince frames.pdf
roswtf是ROS中自查的工具,也可以作为组件使用。针对tf,roswtf可以检查tf的配置并发现常见问题。
参考链接
- tf : http://wiki.ros.org/tf
- tf设计:http://wiki.ros.org/tf/Design
- tf教程:http://wiki.ros.org/tf/Tutorials
- tf: The transform library:http://wiki.ros.org/Papers/TePRA2013_Foote