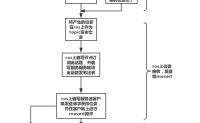
进入课题组的初期,老师分配了一个实际项目,下面写一下搭的项目的大致框架及其心得感悟,因为现在已经越发浮躁,想踏下心来好好做一些回顾一下自己的新手上路。需要准备材料:apriltags下tag标签,usb摄像头,标定板,ur5(也可以用gazebo模型代替) 大致流程……继续阅读 » 光头明明 5年前 (2021-04-26) 2216浏览 0评论2828个赞
参考网址:https://industrial-training-……继续阅读 » 光头明明 5年前 (2021-04-26) 2058浏览 0评论1210个赞
这一块自己参照以下网址配置 https://i……继续阅读 » 光头明明 5年前 (2021-04-26) 3332浏览 0评论332个赞
××××××××××××××××××××××××××××××××××××× 8.15号更新 新的github链接:https://github.com/harrycomeon/Project1-Apriltags-UR5 由于直接采用myrobot的效果并不好,所以……继续阅读 » 光头明明 5年前 (2021-04-26) 3126浏览 0评论2785个赞
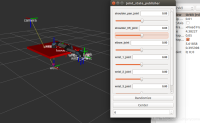
首先说明一下,这里我们的摄像头和tag只是利用了他们的相对位姿,并没有按照实际模型那样布置摄像头和tag,但这并不影响我们观察整个系统的运行效果,布置如下: ……继续阅读 » 光头明明 5年前 (2021-04-26) 2034浏览 0评论656个赞