什么是SDCC?
SDCC是可重定目标的,优化的标准C(ANSI C89,ISO C99,ISO C11)编译器套件,针对的是基于Intel MCS51的微处理器(8031、8032、8051、8052 等), Maxim(以前为Dallas),DS80C390, 飞思卡尔(以前基于Motorola)基于HC08 (hc08,s08), 基于Zilog Z80的MCU (z80,z180,gbz80,Rabbit 2000/3000,Rabbit 3000A,TLCS-90),Padauk(pdk14,pdk15)和 STMicroelectronics STM8。支持Padauk(pdk13),Microchip PIC16和PIC18 目标的工作正在进行中 。可以将其重新定位为其他微处理器。 SDCC套件是从具有不同FOSS许可证的不同来源派生的几个组件的集合。SDCC编译器套件包括:
- SDAS和sdld,一个retargettable汇编程序和连接,基于ASXXXX,由Alan鲍德温写入; (GPL)。
- sdcpp 预处理器,基于GCC cpp ; (GPL)。
- ucsim 模拟器,最初由Daniel Drotos编写;(GPL)。
- sdcdb 源代码级调试器,最初由Sandeep Dutta编写;(GPL)。
- sdbinutils 库归档实用程序,包括从GNU Binutils派生的sdar,sdranlib和sdnm;(GPL)
- SDCC运行时库;(GPL + LE)。Pic设备库和头文件来自Microchip头文件(.inc)和链接程序脚本(.lkr)文件。Microchip要求“头文件应声明它们仅可与可靠的Microchip设备一起使用”,这使它们与GPL不兼容。
- gcc-test 回归测试,源自 gcc-testsuite;(未明确指定许可,但由于它是GCC的一部分,因此可能是GPL许可)
- packihx ; (公共区域)
- makebin ; (zlib / libpng许可证)
- sdcc C编译器,最初由Sandeep Dutta编写;(GPL)。一些功能包括:
- 广泛的MCU特定语言扩展,可有效利用基础硬件。
- 一系列标准优化,例如全局子表达式消除,循环优化(循环不变式,归纳变量的强度降低和循环反转),恒定折叠和传播,复制传播,死代码消除以及“ switch”语句的跳转表。
- MCU特定的优化,包括全局寄存器分配器。
- 适用于MCU的自适应后端,应该非常适合其他8位MCU
- 基于独立规则的窥视孔优化器。
- 完整的数据类型范围:char(8位,1字节),short(16位,2字节), int(16位,2字节),long(32位,4字节),long long(64位,8位元组),浮点数(IEEE 4位元组)和 _Bool / bool。
- 在函数中任何地方添加内联汇编代码的能力。
- 报告功能复杂性的能力,以帮助确定应在汇编器中重写的内容。
- 很好的自动回归测试选择。
SDCC最初由Sandeep Dutta编写,并根据GPL许可发布。自最初发布以来,已经进行了许多错误修复和改进。自1999年12月起,代码已移至SourceForge,所有“用户都变成开发者”都可以访问同一源树。SDCC会不断更新所有用户和开发人员的输入。
安装
简要介绍一下吧: 解压sdcc压缩文件(这里使用最新4.0.0版本),全部文档在sdcc-4.0.0/share/sdcc/doc。 cd sdcc-4.0.0 cp -r * /usr/local
编译
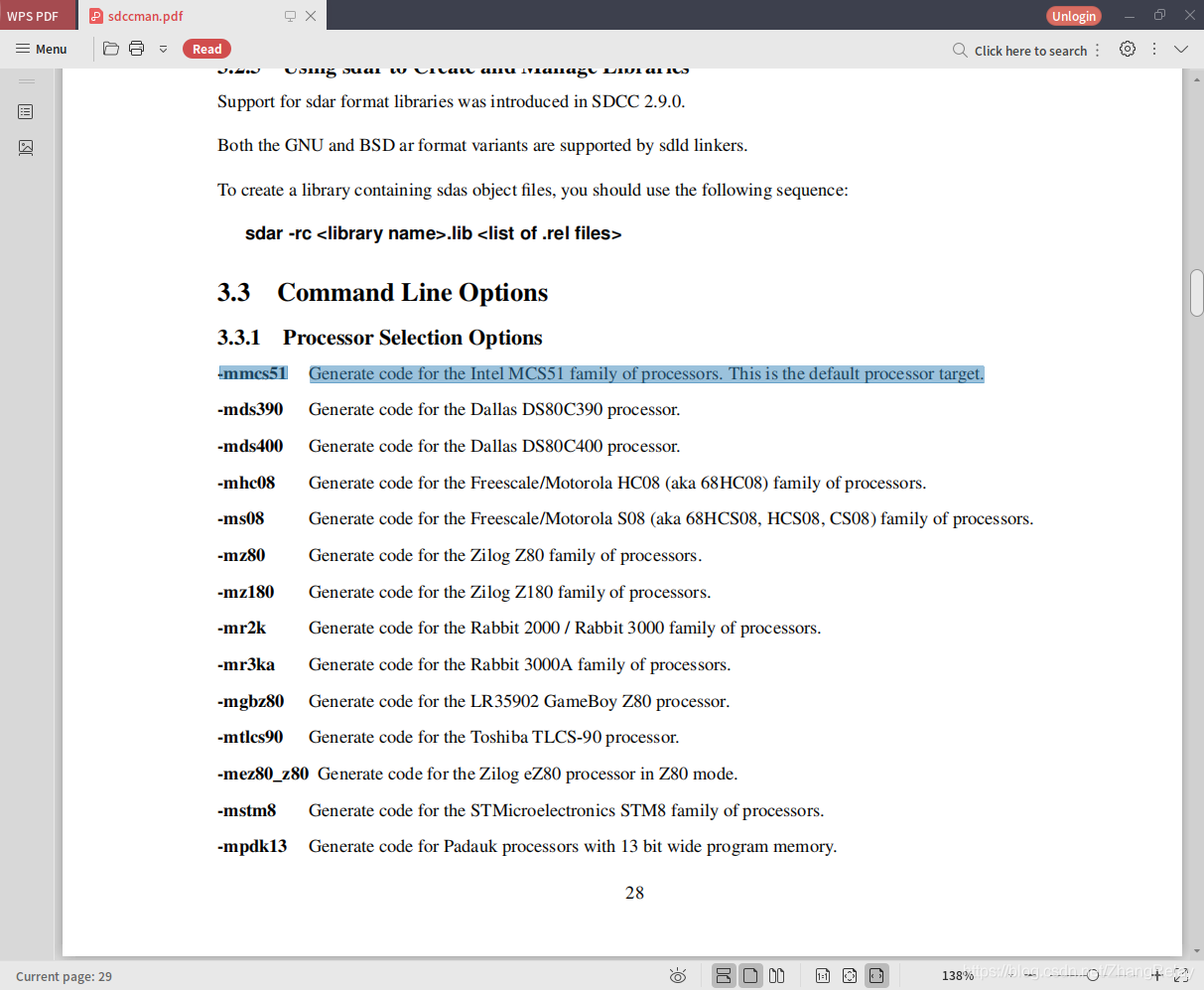
sdcc -mmcs51 xxx.c 最简单安装方法: sudo apt install sdcc
stcgal-STC MCU ISP闪存工具
stcgal是用于STC MCU Ltd的命令行闪存编程工具。8051兼容的微控制器。 STC微控制器具有基于UART/USB的引导加载程序(BSL)。它利用基于数据包的协议通过串行链路刷新代码存储器和IAP存储器。这称为系统内编程(ISP)。BSL还用于配置各种(类似保险丝的)设备选项。不幸的是,该协议没有公开记录,STC仅提供(粗略的)Windows GUI应用程序进行编程。 stcgal是STC的Windows软件的功能全面的开源替代品;它支持多种MCU,非常便携,适合自动化。
特征
- 支持STC 89/90/10/11/12/15/8系列
- UART和USB BSL支持
- 显示零件信息
- 确定工作频率
- 程序闪存
- 程式IAP / EEPROM
- 设置设备选项
- 读取唯一的设备ID(STC 10/11/12/15/8)
- 修整RC振荡器频率(STC 15/8)
- 使用DTR切换键或自定义Shell命令自动重启电源
- 自动UART协议检测
快速开始
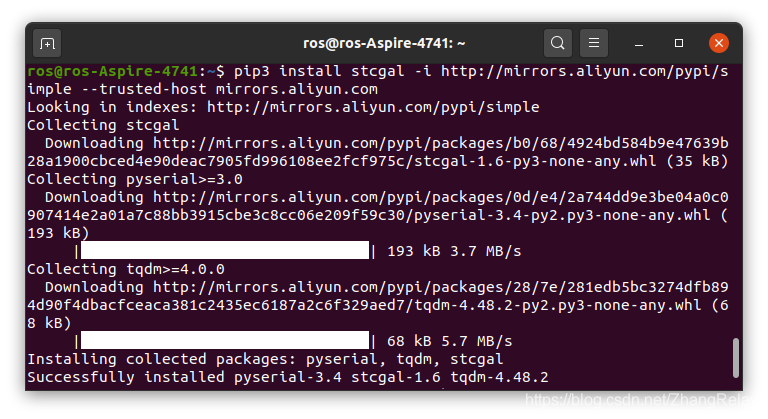
安装stcgal(可能需要root /管理员权限):
pip3 install stcgal
Collecting stcgal
Downloading https://files.pythonhosted.org/packages/b0/68/4924bd584b9e47639b28a1900cbced4e90deac7905fd996108ee2fcf975c/stcgal-1.6-py3-none-any.whl
Collecting tqdm>=4.0.0 (from stcgal)
Downloading https://files.pythonhosted.org/packages/28/7e/281edb5bc3274dfb894d90f4dbacfceaca381c2435ec6187a2c6f329aed7/tqdm-4.48.2-py2.py3-none-any.whl (68kB)
100% |████████████████████████████████| 71kB 754kB/s
Collecting pyserial>=3.0 (from stcgal)
Using cached https://files.pythonhosted.org/packages/0d/e4/2a744dd9e3be04a0c0907414e2a01a7c88bb3915cbe3c8cc06e209f59c30/pyserial-3.4-py2.py3-none-any.whl
Installing collected packages: tqdm, pyserial, stcgal
Successfully installed pyserial-3.4 stcgal-1.6 tqdm-4.48.2
如果网络问题,请尝试如下命令: pip3 install stcgal -i http://mirrors.aliyun.com/pypi/simple –trusted-host mirrors.aliyun.com
 调用stcgal并显示用法:
调用stcgal并显示用法:
stcgal -h
usage: stcgal [-h] [-a] [-r RESETCMD]
[-P {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto}]
[-p PORT] [-b BAUD] [-l HANDSHAKE] [-o OPTION] [-t TRIM] [-D]
[-V]
[code_image] [eeprom_image]
stcgal 1.6 - an STC MCU ISP flash tool
(C) 2014-2018 Grigori Goronzy and others
https://github.com/grigorig/stcgal
positional arguments:
code_image code segment file to flash (BIN/HEX)
eeprom_image eeprom segment file to flash (BIN/HEX)
optional arguments:
-h, --help show this help message and exit
-a, --autoreset cycle power automatically by asserting DTR
-r RESETCMD, --resetcmd RESETCMD
shell command for board power-cycling (instead of DTR
assertion)
-P {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto}, --protocol {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto}
protocol version (default: auto)
-p PORT, --port PORT serial port device
-b BAUD, --baud BAUD transfer baud rate (default: 19200)
-l HANDSHAKE, --handshake HANDSHAKE
handshake baud rate (default: 2400)
-o OPTION, --option OPTION
set option (can be used multiple times, see
documentation)
-t TRIM, --trim TRIM RC oscillator frequency in kHz (STC15+ series only)
-D, --debug enable debug output
-V, --version print version info and exit
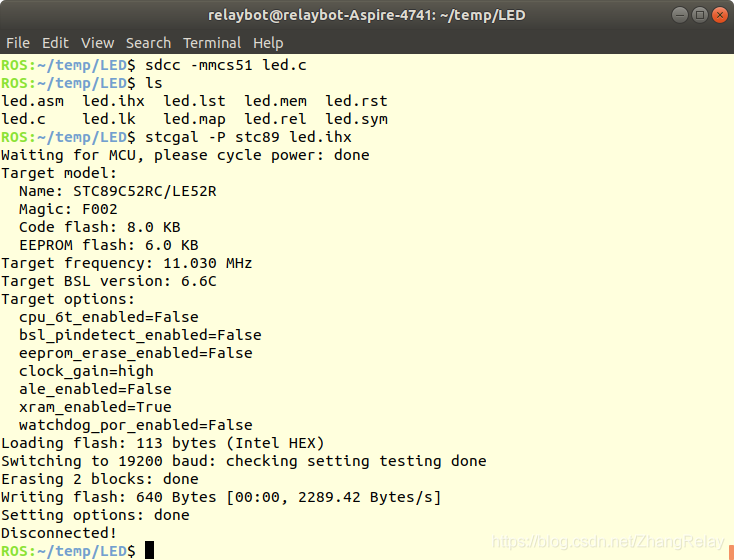
stcgal -P stc89 xxx.ihx
程序需要做一些修改的,以LED灯为例吧:
#include <reg52.h> //52系列单片机头文件
sbit LSA = P1^5; //LED位选译码地址引脚A
sbit LSB = P1^6; //LED位选译码地址引脚B
sbit LSC = P1^7; //LED位选译码地址引脚C
int main(void)
{
while(1) //主程序中设置死循环程序,保证周而复始运行
{
//使LED灯的总开关三极管Q6导通,+5V加到LED灯组
LSA = 0;
LSB = 0;
LSC = 0;
P0 = 0xfe; //点亮一个发光二极管
}
}
在sdcc下需修改为:
#include <8052.h>
#define LSA P1_5
#define LSB P1_6
#define LSC P1_7
int main(void)
{
while(1)
{
LSA = 0;
LSB = 0;
LSC = 0;
P0 = 0xfe;
}
}
Linux下无需安装驱动!!! sdcc -mmcs51 led.c stcgal -P stc89 led.ihx
 闪烁:
闪烁:
#include <8052.h>
#define LSA P1_5 //LED位选译码地址引脚A
#define LSB P1_6 //LED位选译码地址引脚B
#define LSC P1_7 //LED位选译码地址引脚C
#define Led10 P0_7 //定义P0.7名字为led10
int main(void)
{
unsigned int a; //定义无符号的整型变量a
while(1)
{
//使LED灯的总开关三极管Q6导通,+5V加到LED灯组
LSA = 0;
LSB = 0;
LSC = 0;
Led10 = 0; //点亮LED10
a = 50000;
while(a--); //50000次的循环,通过消耗时间以达到延时的目的
Led10 = 1;; //熄灭LED10
a = 50000;
while(a--); //延时
}
}
呼吸灯:
#include <8052.h>
#define LSA P1_5 //LED位选译码地址引脚A
#define LSB P1_6 //LED位选译码地址引脚B
#define LSC P1_7 //LED位选译码地址引脚C
#define Led10 P0_7 //定义P0.7名字为led10
int atime=64;
void delay(unsigned int pms) //延时函数
{
unsigned int x;
unsigned int y;
for(x=pms;x>0;x--)
for(y=11;y>0;y--)
;
}
void ledfade(unsigned int i) //呼吸灯
{
Led10 = 0;
delay(i);
Led10 = 1;
delay(atime-i);
}
int main(void)
{
int a; //定义无符号的整型变量a
while(1)
{
//使LED灯的总开关三极管Q6导通,+5V加到LED灯组
LSA = 0;
LSB = 0;
LSC = 0;
for(a=0;a<atime;a++)
{
ledfade(a);
}
for(a=atime;a>0;a--)
{
ledfade(a);
}
}
}
呼吸跑马灯???(需改进优化哦!)
#include <8052.h>
#define LSA P1_5 //LED位选译码地址引脚A
#define LSB P1_6 //LED位选译码地址引脚B
#define LSC P1_7 //LED位选译码地址引脚C
#define Led10 P0_0 //定义P0.0名字为led10
#define Led11 P0_1 //定义P0.0名字为led11
#define Led12 P0_2 //定义P0.0名字为led12
#define Led13 P0_3 //定义P0.0名字为led13
#define Led14 P0_4 //定义P0.0名字为led14
#define Led15 P0_5 //定义P0.0名字为led15
#define Led16 P0_6 //定义P0.0名字为led16
#define Led17 P0_7 //定义P0.0名字为led17
int atime=64;
void delay(unsigned int pms) //延时函数
{
unsigned int x;
unsigned int y;
for(x=pms;x>0;x--)
for(y=11;y>0;y--)
;
}
void ledfade0(unsigned int i) //呼吸灯
{
Led10 = 0;
delay(i);
Led10 = 1;
delay(atime-i);
}
void ledfade1(unsigned int i) //呼吸灯
{
Led11 = 0;
delay(i);
Led11 = 1;
delay(atime-i);
}
void ledfade2(unsigned int i) //呼吸灯
{
Led12 = 0;
delay(i);
Led12 = 1;
delay(atime-i);
}
void ledfade3(unsigned int i) //呼吸灯
{
Led13 = 0;
delay(i);
Led13 = 1;
delay(atime-i);
}
void ledfade4(unsigned int i) //呼吸灯
{
Led14 = 0;
delay(i);
Led14 = 1;
delay(atime-i);
}
void ledfade5(unsigned int i) //呼吸灯
{
Led15 = 0;
delay(i);
Led15 = 1;
delay(atime-i);
}
void ledfade6(unsigned int i) //呼吸灯
{
Led16 = 0;
delay(i);
Led16 = 1;
delay(atime-i);
}
void ledfade7(unsigned int i) //呼吸灯
{
Led17 = 0;
delay(i);
Led17 = 1;
delay(atime-i);
}
int main(void)
{
int a; //定义无符号的整型变量a
while(1)
{
//使LED灯的总开关三极管Q6导通,+5V加到LED灯组
LSA = 0;
LSB = 0;
LSC = 0;
for(a=0;a<atime;a++)
{
ledfade0(a);
}
for(a=atime;a>0;a--)
{
ledfade0(a);
}
for(a=0;a<atime;a++)
{
ledfade1(a);
}
for(a=atime;a>0;a--)
{
ledfade1(a);
}
for(a=0;a<atime;a++)
{
ledfade2(a);
}
for(a=atime;a>0;a--)
{
ledfade2(a);
}
for(a=0;a<atime;a++)
{
ledfade3(a);
}
for(a=atime;a>0;a--)
{
ledfade3(a);
}
for(a=0;a<atime;a++)
{
ledfade4(a);
}
for(a=atime;a>0;a--)
{
ledfade4(a);
}
for(a=0;a<atime;a++)
{
ledfade5(a);
}
for(a=atime;a>0;a--)
{
ledfade5(a);
}
for(a=0;a<atime;a++)
{
ledfade6(a);
}
for(a=atime;a>0;a--)
{
ledfade6(a);
}
for(a=0;a<atime;a++)
{
ledfade7(a);
}
for(a=atime;a>0;a--)
{
ledfade7(a);
}
}
}
如果需要将51接入机器人操作系统ROS,可以参考: