记得很久以前写过一篇转速环PI参数整定的文章,但是实际效果却不太好,为此对这个遗留已久的问题,今天在这篇文章内详细阐述转速环参数的设计过程。由于也很长时间没有再碰自动控制原理这一块,因此文章将会附带回顾一些有关自动控制原理方面的基础知识。最近上班回家时间不太多,只能慢慢写了,我就一篇一篇的分小段的来啦,请见谅。
1 电机传递函数的由来
电机的传递函数来源于运动方程,PMSM运动方程如下,注意这里的物理量we,这是电角速度,
——电机传递函数的来源")
不考虑负载转矩的情况下,其对应的传递函数框图为,图中可以看到最后一个方框是1/Js,注意图中输入输出是wr,也就是we/np = wr电机机械转速。
——电机传递函数的来源")
若将输入输出的单位换成rpm转每分,那么其传递函数框图为,以上两张图大家只用看框图最后一个方框内的函数即可,此处为电机运动方程转到S域后的表达式。
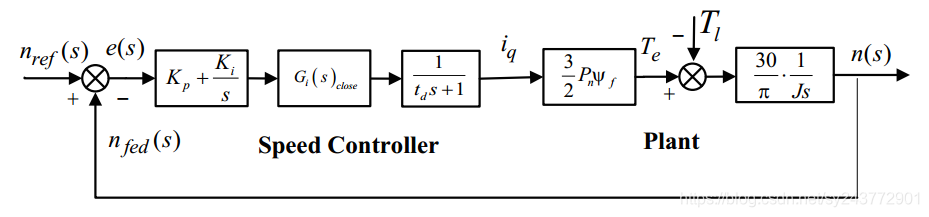
在得知电机自身的传递函数的来由之后,需要对以上传递函数框图中各个环节传递函数的由来进行一个深入剖析,从而保证后续参数整定的正确性以及有效性,具体的各个环节从而而来请大家参照后续文章。
整理不易,希望大家帮忙点个赞呀~谢谢啦~^_^
参数整定以及自动控制原理系列文章:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)(一)
如何用matlab画bode图——自动控制原理基础补充(一)
一阶惯性环节的性能分析——自动控制原理基础补充(二)
二阶系统的性能分析(开环相幅和阶跃响应)——自动控制原理基础补充(三)
转速环PI参数整定详解(一)——电机传递函数的来源
转速环PI参数整定详解(二)——转速环各个环节传递函数的来源
转速环PI参数整定详解(三)——转速环开环传函特性及其整定策略




