?上周四(9月28日),星火在线课堂举办了第一次在线课程,我有幸成为第一位分享嘉宾,与大家分享了一下MoveIt!的相关内容,直播过程中共有800多位小伙伴共同参……继续阅读 » 古月 5年前 (2021-04-26) 3231浏览 0评论340个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2570浏览 0评论2002个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3131浏览 0评论1666个赞
2018年1月7日下午,第一次ROS Taipei年会顺利在台北举办,我也有幸受邀参与了这次活动,并第一次详细介绍了近两年来自己使用ROS进行机器人开发的具体细节。……继续阅读 » 古月 5年前 (2021-04-26) 2721浏览 0评论1334个赞
我们在做机器人ROS开发时,常常会遇到相同速度控制消息的选择问题。比如说控制机器人移动的……继续阅读 » 古月 5年前 (2021-04-26) 3502浏览 0评论463个赞
随着人工智能的发展,机器人也迎来了全新的发展机遇。机器人与人工智能大潮的喷发,必将像互联网一般,再次为人们的现代生活带来一次全新的革命。1. 历史起源硬件技术的……继续阅读 » 古月 5年前 (2021-04-26) 2299浏览 0评论2129个赞
2018年1月7日下午,第一届ROS Taipei年会顺利在台北举办,我有幸受邀参加了这次活动,并详细介绍了近两年来自己使用ROS进行机器人开发的具体细节。 在这次年会上,来自各地的开……继续阅读 » 古月 5年前 (2021-04-26) 2186浏览 0评论2065个赞
近几年,机器人和人工智能繁荣发展,曾经运行在实验室的机器人已经逐渐走入千家万户的生活。作为机器人开发利器的ROS也得到了非常广泛的应用,成为机器人领域的普遍标准。 ROS原本针对科研领……继续阅读 » 古月 5年前 (2021-04-26) 2055浏览 0评论1231个赞
上篇讲到,在通信机制部分,我们完全舍弃了ROS基于话题和服务的通信机制,自己又实现了一套通信系统,具体的实现主要基于Linux系统的各种通信方式,此处暂且不表,这篇我们来看下ROS另外一个重要部分——开发工具,如何在机器人产品化过程中应用。……继续阅读 » 古月 5年前 (2021-04-26) 3412浏览 0评论883个赞
上篇我们讲到ROS中的开发工具,可以提高我们的开发效率,每一种工具都有其擅长之地,也有其不足之处,所以在设计、开发机器人产品的过程中,可以综合考虑,发挥每一个开发工具的优势。本篇我们来分析一下ROS中丰富的应用功……继续阅读 » 古月 5年前 (2021-04-26) 3019浏览 0评论1129个赞
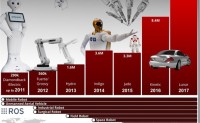
诞生于2007年的ROS,发展速度之迅猛超出了所有人的预料,已经成为一个机器人领域的生态系统,可以提供机器人相关的全方位技术,从硬件到软件,从框架到功能,从驱动到应用。。。 ……继续阅读 » 古月 5年前 (2021-04-26) 1889浏览 0评论1089个赞
PR2(Personal Robot 2,个人机器人2代)是Willow Garage公司设计的机器人平台,其中数字2代表第二代机器人。 ……继续阅读 » 古月 5年前 (2021-04-26) 2751浏览 0评论1687个赞
上一篇介绍了……继续阅读 » 古月 5年前 (2021-04-26) 3502浏览 0评论1095个赞
Universal Robots(优傲机器人)公司是一家引领协作机器人全新细分市场的先驱企业,该公司成立于2005年,关注机器人的用户可操作性和灵活度,总部位于丹麦的欧登塞市,主要的机器人产品有:……继续阅读 » 古月 5年前 (2021-04-26) 2299浏览 0评论2398个赞
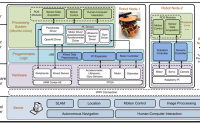
HRMRP(Hybrid Real-time Mobile Robot Platform,混合实时移动机器人平台)是笔者在2012年和实验室的小伙伴们一起从零开始设计、开发的一款机器人平台,其中大部分扩展电路、驱……继续阅读 » 古月 5年前 (2021-04-26) 3430浏览 0评论1500个赞
从ROS最初在国内的萌芽,到如今的欣欣向荣,很高兴我们可以看到ROS在国内的大发展,也很荣幸能够为ROS在国内的推广贡献自己的一点微薄之力。 ……继续阅读 » 古月 5年前 (2021-04-26) 2856浏览 0评论448个赞
2011年底,我第一次接触ROS。当时一个实验室师兄在学术会议上听说了ROS,意识到它的前景广阔,考虑到我当时的研究方向,于是安排我进行研究。那时国内外ROS的学习环境比较艰苦,几乎只有wiki的基础教程(也没有现在完善)。所以开始的我,内心其……继续阅读 » 古月 5年前 (2021-04-26) 3414浏览 0评论360个赞
前言 1 初识ROS 1.1 ROS是什么……继续阅读 » 古月 5年前 (2021-04-26) 2812浏览 0评论794个赞
MoveIt!是ROS中一个重要的集成化开发平台,由一系列移动操作的功能包组成,提供运动规划、操作控制、3D感知、运动学等功能模块,是ROS社区中使用度排名前三的功能包,目前已……继续阅读 » 古月 5年前 (2021-04-26) 2770浏览 0评论231个赞
古月容易让人想到古龙笔下的大侠。 大侠的特质是,开山建宗,随而遁影山林,空余武林纷说大侠的故事。 古月在CSDN留下了那些优……继续阅读 » 古月 5年前 (2021-04-26) 2496浏览 0评论2265个赞
2011年,当国内ROS资料还很匮乏的时候,正在读本科的古月同学为了开发一款机器人,一边摸索自学一边总结撰写了《ROS探索总结》系列博客。由于其博文条理清晰、主题丰富并具有很强的可操作性,文章一经推出,便深受广大ROS网友的热爱。从此“古月大神……继续阅读 » 古月 5年前 (2021-04-26) 3355浏览 0评论1074个赞
近年机器人技术发展越催成熟,越来越多的机器人技术应用在不同的领域。基于机器人的技术产生出来的产品推陈出新,如物流机器人、家庭陪护机器人、协作机器人、送餐机器人、清洁机器人、无人机、无人汽车等等,可谓百花齐放。大众对机器人的认知及学习的兴趣也不断……继续阅读 » 古月 5年前 (2021-04-26) 1840浏览 0评论2139个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2136浏览 0评论1979个赞
VREP( Virtual Robot Experimentation Platform)是一款瑞士军刀级的机器人仿真软件,包含的功能众多,而且使用方便,在各种系统下都有相应的安装文件。 ……继续阅读 » 古月 5年前 (2021-04-26) 3172浏览 0评论493个赞
8月1日晚,古月君在深蓝学院的的公开课平台,和大家一起聊了下ROS机器人开发的相关案例,主要结合自身机器人开发经验,从机器人系统组成、移动机器人开发案例和机械臂开发案例等三个方面,介绍了古月君是如何将ROS应用于……继续阅读 » 古月 5年前 (2021-04-26) 3233浏览 0评论1151个赞
在刚刚结束的中国国际工业博览会上,精锋微控再次亮相,展示了业界首款搭载驱控一体片上系统的机器人开放平台——ProbotSys。 ……继续阅读 » 古月 5年前 (2021-04-26) 3060浏览 0评论212个赞
Windows官方终于支持ROS了! 近期微软官方终于发布消息称,将把ROS带到Windows 10,并且命名为“ROS1”,而且还推出了一个实验版本。 ……继续阅读 » 古月 5年前 (2021-04-26) 1847浏览 0评论1106个赞
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令。当系统中的节点数量不断增加时,每个节点一个终端的模式会变得非常麻烦。那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的。……继续阅读 » 古月 5年前 (2021-04-26) 2567浏览 0评论1960个赞
机器人系统中存在大量数据,这些数据在计算过程中往往都处于数据形态,比如图像数据中0~255的RGB值。但是这种数据形态的值往往不利于开发者去感受数据所描述的内容,所以常常需要将数据可视化显示,例如机器人模型的可视……继续阅读 » 古月 5年前 (2021-04-26) 3298浏览 0评论2908个赞
……继续阅读 » 古月 5年前 (2021-04-26) 2280浏览 0评论1270个赞
仿真/模拟(Simulation),泛指基于实验或训练的目的,将原本的系统、事务或流程,建立一个模型以表征其关键特性(Key Characteristics)或者行为/功能,予以系统化与公式化,以便对关键特征做出模拟。 ……继续阅读 » 古月 5年前 (2021-04-26) 2395浏览 0评论1990个赞
知乎原文链接: ……继续阅读 » 古月 5年前 (2021-04-26) 2193浏览 0评论1174个赞
ROS已经走过11个年头,伴随机器人技术的大发展,ROS也得到了极大的推广和应用。尽管还存在不少局限性,但依然无法掩盖ROS的锋芒,社区内的功能包还是呈指数级逐年上涨,为机器人开发带来了巨大的便利。 ……继续阅读 » 古月 5年前 (2021-04-26) 3541浏览 0评论1282个赞
上篇“Why ROS 2.0”之后,这篇我们继续“What is ROS 2.0”。 一、ROS 2的设计目标相比RO……继续阅读 » 古月 5年前 (2021-04-26) 2820浏览 0评论1763个赞
也许你还不知道,ROS 2刚刚发布了第三个正式版——Crystal Clemmys,这个版本支持以下平台: Tier 1 platforms:……继续阅读 » 古月 5年前 (2021-04-26) 3085浏览 0评论2845个赞
ROS 2提供了一个简单的机器人演示——dummy_robot,可以让我们快速熟悉ROS 2中各种开发工具的基本使用方法。 一、运行dummy robot与rviz2<……继续阅读 » 古月 5年前 (2021-04-26) 2933浏览 0评论1138个赞
~欢迎关注~微信公众号:古月居新浪微博:古月春旭知乎专栏:古月居 gaz……继续阅读 » 古月 5年前 (2021-04-26) 2168浏览 0评论1134个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭(……继续阅读 » 古月 5年前 (2021-04-26) 2303浏览 0评论1000个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭(https://weibo.com/hcx196)知乎专栏:古月居(……继续阅读 » 古月 5年前 (2021-04-26) 3417浏览 0评论2236个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭(https://weibo.com/hcx196)知乎专栏:古月居(……继续阅读 » 古月 5年前 (2021-04-26) 3017浏览 0评论500个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭知乎专栏:……继续阅读 » 古月 5年前 (2021-04-26) 3173浏览 0评论1212个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭知乎专栏:……继续阅读 » 古月 5年前 (2021-04-26) 2525浏览 0评论1750个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭……继续阅读 » 古月 5年前 (2021-04-26) 2147浏览 0评论917个赞
说起全国大学生智能汽车竞赛,古月君有滔滔不绝的内容可以分享,自大二开始,我从懵懂少年跟着师兄比赛,到自己挑大梁拿到国一,再到带队挣得全国前三,基本就是大学本科的青春。……继续阅读 » 古月 5年前 (2021-04-26) 3481浏览 0评论2482个赞
~欢迎关注~微信公众号:古月居(guyue_home)新浪微博:古月春旭……继续阅读 » 古月 5年前 (2021-04-26) 2911浏览 0评论1504个赞