前段时间周更的vSLAM基础系列突然停更了,也是因为考试周时间不足以让我在看书和写博客之间调剂了。希望朋友们能体谅一下。 Introduction") 从这周开始会开始更新一个新的栏目就是从零手写VIO。这个没有像视觉SLAM十四讲那样的textbook,so我们就在这个平台一起分享和学习叭~ 视觉 + IMU 融合定位的基础理论和实现:
从这周开始会开始更新一个新的栏目就是从零手写VIO。这个没有像视觉SLAM十四讲那样的textbook,so我们就在这个平台一起分享和学习叭~ 视觉 + IMU 融合定位的基础理论和实现:
VIO概述
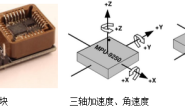
VIO:(Visual-Inertial Odometry) 以视觉与 IMU 融合实现里程计 IMU:(Inertial Measurement Unit),惯性测量单元
- 典型6轴 IMU 以较高频率(
)返回被测量物体的角速度与加速度
- 受自身温度、零偏、振动等因素干扰,积分得到的平移和旋转容易漂移
加速度计Accelerometer↓ Introduction")
Introduction")
Introduction") 陀螺仪Gyroscope↓
陀螺仪Gyroscope↓ Introduction") 视觉:(Visual Odometry)
视觉:(Visual Odometry)
- 以图像形式记录数据,频率较低(
居多)
- 通过图像特征点或像素推断相机运动
是不是发现了两者互补哈~
我就是在记笔记哈哈哈哈!但是不是对PPT的照搬,我虽然会把内容搬下来但是会加入我自己比较通俗的理解。
Introduction")
可利用视觉定位信息来估计 IMU 的零偏,减少 IMU 由零偏导致的发散和累计误差;反之,IMU 可以为视觉提供快速运动时的定位。 松耦合 loose couple:自个算自个的,最后整合数据,是相对独立的;将 IMU 定位与视觉/GNSS 的位姿直接融合,融合过程对两者本身不产生影响,做为后处理方式输出。典型方案为卡尔曼滤波器(Kalman filtering)。 Introduction") 紧耦合 tightly couple:视觉和 IMU 拉着手,视觉摔翻了(GG了)IMU跟着摔(哈哈哈),就是两者同时用来估计同一个问题。
紧耦合 tightly couple:视觉和 IMU 拉着手,视觉摔翻了(GG了)IMU跟着摔(哈哈哈),就是两者同时用来估计同一个问题。 Introduction") IMU 数据可与多种定位方案融合
IMU 数据可与多种定位方案融合
- 自动驾驶中通常用 IMU+ GPS/差分 GPS/RTK 的融合定位方案,形成 GNSS-INS 组合导航系统,达到厘米组定位精度;
- 头戴式 AR/VR 头盔则多使用视觉 +IMU 的 VIO 定位系统,形成高帧率定位方案。
数学回顾(李群李代数的可以看,不重复写了)
视觉SLAM-从零爬起打破秃头魔咒——(三)李群与李代数 Introduction") 令
令 Introduction") 则有
则有 ![]()
- 四元数和矩阵运算类似,如何求
由于 也就是四元数模长的平方,并满足交换律
。
Introduction")
- 3D旋转公式(这里不给出详细证明,Introduction to quaternion里有)
链接:https://pan.baidu.com/share/init?surl=XDqSzbHcmH4PERhMO_t7zA 密码: 6whk 任意向量 沿着以单位向量定义的旋转轴
旋转
度之后的
可以用四元数乘法来获得,令
,
,那么:
Introduction")
- 罗德里格斯公式
之前我写过它的证明: Introduction")
- 在VIO中使用右乘扰动模型,之前在十四讲中,常使用的是左乘扰动模型,下面就讲讲为什么用右乘扰动模型的拙见:
首先相机坐标系为 ![]() ,世界坐标系为
,世界坐标系为 ,IMU坐标系为
,用
表达并存储IMU的定位信息,
的平移部分.translation()可直接视作IMU在世界中的坐标。 扰动
是IMU在时间
到
相对于W的变换,求导对象
是在时间
时世界坐标系到IMU坐标系的变换,那么
就是
![]() 即右乘扰动。
即右乘扰动。
四元数对时间求导
设某个旋转运动的旋转轴为单位向量 ,绕该轴旋转的角度为
,那么对应的单位四元数为:
单位四元数!就是为什么程序里定义四元数要normalize
Introduction") 当旋转一段微小时间,即角度趋于0时,容易有:
当旋转一段微小时间,即角度趋于0时,容易有: Introduction") (
( 当
极小时,
) 其中
表示旋转轴(是用
和单位向量
得出的矢量),模长
标量表示旋转角度。 由于角速度:
Introduction") 四元数时间导数:
四元数时间导数: Introduction") (
( 其实就是只是实数1,也就是
) 旋转矩阵
关于时间的导数,十四讲中引出李代数时从:
Introduction") 得到
得到 是反对称矩阵令它为
其实我们证明过这个
就是个旋转向量。 使用旋转矩阵
时,角速度为
,那么旋转矩阵
关于时间的导数可写作:
该式成为泊松公式(Possion’s equation),其中
是反对称矩阵算子:
Introduction") 这里我不能确定泊松公式是否和上面的李代数的推导有关,希望有dalao能指点迷津!
这里我不能确定泊松公式是否和上面的李代数的推导有关,希望有dalao能指点迷津!
左扰动雅可比和右扰动雅可比
- 左扰动雅可比
Introduction")
- 右扰动雅可比
Introduction")
- 旋转连乘的雅克比
BCH的线性表达: Introduction") 由于要对
由于要对 上的微小量
(李代数形式)求导,故要对矩阵做vee(
)和对数运算(
)变成李代数形式,如下:
Introduction") 用到了右乘小量,上面的式(2),以及
用到了右乘小量,上面的式(2),以及 为SO(3)上的右雅可比:
Introduction")
是AngleAxis角轴,
是旋转轴单位向量,
是旋转角也是旋转向量的模。 SO(3)的伴随性质:
![]() 求对
求对 旋转连乘的雅克比:
Introduction") 这里能够看到,微小扰动
这里能够看到,微小扰动 经过处理,分子上的小量成了
,然而右雅可比仍然是
的李代数构成的角轴形式表达的
。