一、概要 比赛规则与赛道: 比赛没有赛道,只有电磁线。但赛道元素包括有直道、弯道、坡道、十字路口以及横断路障。室外电磁组原则上选择室外的马路、草坪、体育场组织比赛,场地内可能会存在高度不大于 2 厘米的硬质路坎、沙坑、深度不超过 2 厘米的水坑等。 选手制作的车模完成赛道运行一周。比赛时间从车模冲过起跑线到重新回到起跑线为止。 越野车外形
") 车的功能与实现:
车的功能与实现:
") 本文脉络
本文脉络
")
二、硬件部分:
1.主控板 (1)原理图: K60引脚分配: 引脚通过查K60引脚功能来分配,除去特殊功能引脚外,其余引脚为普通I/O口 特殊引脚: I2C通信:SDA,SCL FTM(PWM输出):PWMA,DPWM AD(模数转换):AD1~AD6 串口通信:TX2,RX2
") 电源部分及笔记:(7~8v输入,5v和3.3v输出)
电源部分及笔记:(7~8v输入,5v和3.3v输出)
") 以下为原理笔记:
以下为原理笔记:
")
") 按键模块:(SW2为4并排按键,用于设置车的模式)
按键模块:(SW2为4并排按键,用于设置车的模式)
")
") 电机输出(为排针插座,接驱动板,DIRA为电机方向控制,PWMA为速度控制):
电机输出(为排针插座,接驱动板,DIRA为电机方向控制,PWMA为速度控制):
") 舵机输出(为排针插座,5v供电电压,DPWM为脉冲输出,以控制舵机转角):
舵机输出(为排针插座,5v供电电压,DPWM为脉冲输出,以控制舵机转角):
") AD输入(为排针插座,接传感器板,6路电感值输入):
AD输入(为排针插座,接传感器板,6路电感值输入):
") 普通IO口:
普通IO口:
") 蜂鸣器:
蜂鸣器:
") (2)PCB和3D图 PCB中,logo部分和敷铜(GND)已去除,以更清晰显示电路
(2)PCB和3D图 PCB中,logo部分和敷铜(GND)已去除,以更清晰显示电路
")
") 2.电机驱动板:用于驱动电机 (1)原理图 H桥电机驱动: VCC直接接电池(7~8V)
2.电机驱动板:用于驱动电机 (1)原理图 H桥电机驱动: VCC直接接电池(7~8V)
") H桥原理:
H桥原理:
") 12v升压(用于IR2104s驱动mos管):
12v升压(用于IR2104s驱动mos管):
") 电源部分: VCC是电机供电
电源部分: VCC是电机供电
") 12V(用于IR2104s驱动MOS)和3.3v(逻辑芯片供电):
12V(用于IR2104s驱动MOS)和3.3v(逻辑芯片供电):
")
") 调速及转向: Led显示电机方向及速度大小(速度越大越亮):
调速及转向: Led显示电机方向及速度大小(速度越大越亮):
") 排针插座信号输入,3.3v用于逻辑芯片供电:
排针插座信号输入,3.3v用于逻辑芯片供电:
") 逻辑非和逻辑与芯片:
逻辑非和逻辑与芯片:
")
") 原理笔记:
原理笔记:
") (2)PCB(GND敷铜已去)和3D图
(2)PCB(GND敷铜已去)和3D图
")
") 3.传感器板:处理电感数据 (1)原理图 电源部分:
3.传感器板:处理电感数据 (1)原理图 电源部分:
") 信号放大:(opa2350为运放,根据电阻,放大倍数最大50倍,输入输出为正弦波,共6路)
信号放大:(opa2350为运放,根据电阻,放大倍数最大50倍,输入输出为正弦波,共6路)
") 信号整流(经实验,连接AD输出和GND的电容会严重削弱信号,故去除):
信号整流(经实验,连接AD输出和GND的电容会严重削弱信号,故去除):
") 信号输入输出(为插座):
信号输入输出(为插座):
") (2)PCB(GND敷铜已去除)和3D图
(2)PCB(GND敷铜已去除)和3D图
")
") 4.电磁探测板:探测电磁线信号 (1)原理图 谐振部分:谐振可以很好放大信号,电感电容值根据20K频率谐振计算。
4.电磁探测板:探测电磁线信号 (1)原理图 谐振部分:谐振可以很好放大信号,电感电容值根据20K频率谐振计算。
") 其他部分(LED和排针插座):
其他部分(LED和排针插座):
") 2)PCB(GND敷铜已去除)和3D图
2)PCB(GND敷铜已去除)和3D图
")
") 电感与电磁线垂直时信号最强,故六路电感位置摆放:
电感与电磁线垂直时信号最强,故六路电感位置摆放:
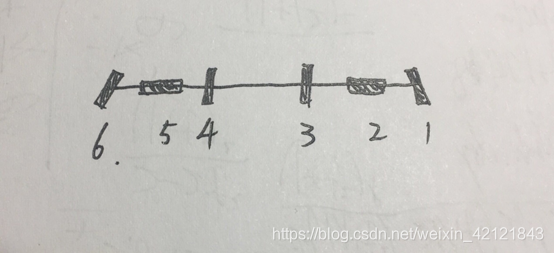 这样放置电感,可以满足在多方位的检测需求。
这样放置电感,可以满足在多方位的检测需求。
三、软件部分
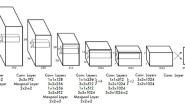
智能车主要用到的几样硬件需要软件驱动,包括电机,舵机,编码器,ADC采集和超声波模块;还有一些调车的辅助模块,如OLED,蓝牙,串口,这些部分都采用了相应的例程做了需要的修改。 1.电机和舵机 (1).电机 电机部分需要主控芯片输出PWM波控制电机转速,编写了电机初始化及控制函数,包括了电机正反转的设置。
void Motor_Init()
{
GPIO_Init(PORTA,7,1,1);//GPIO初始化
FTM_PWM_Init(FTM0, FTM_CH2, 0,0);//PWM初始化
Motor_Control(0,0);
}
void Motor_Control(int16 PWM,int DIR)//PWM为速度参数,DIR为正反转
{
if(DIR==0)
{
GPIO_Ctrl(PORTA,7,0);
}
else
{
GPIO_Ctrl(PORTA,7,1);
}
FTM_PWM_Duty(FTM0,FTM_CH2,PWM);//PWM最大1000
}
(2).舵机 舵机正常工作需要的50hz的PWM波来控制转角,通过控制占空比在5%到15%之间,可以实现舵机180度范围的旋转。在前期的调试过程中确定了舵机状态处于中点的占空比值,在这一值的基础上直接加减实现舵机控制左右转。 测试代码:使轮子到达两个最大转向角
FTM_PWM_Duty(FTM2,FTM_CH0,730);
time_delay_ms(2000);
FTM_PWM_Duty(FTM2,FTM_CH0,835);
time_delay_ms(2000);
2、传感器(电感,编码器和超声波) 越野组采用电感电容谐振来感应电磁引导线的磁场信号,信号经过谐振放大以及运放放大后通过芯片的ADC模块采集。由于采集的信号可能存在较大波动,采用了均值滤波的方式,选取四次采样平均值作为实际使用的数据。考虑到车前的三组电感相对电磁线的位置有区别,为了使收集到的数据尽量趋于线性变化,对数据做了线性化处理,根据三组电感的位置乘上了参数用作矫正。
void ADC_6()
{
int i;
volt[0]=ADC_Ave(ADC1,ADC1_SE14,ADC_16bit,4);//均值滤波
volt[1]=ADC_Ave(ADC1,ADC1_SE15,ADC_16bit,4);
volt[2]=ADC_Ave(ADC1,ADC1_SE12,ADC_16bit,4);
volt[3]=ADC_Ave(ADC1,ADC1_SE13,ADC_16bit,4);
volt[4]=ADC_Ave(ADC1,ADC1_SE10,ADC_16bit,4);
volt[5]=ADC_Ave(ADC1,ADC1_SE11,ADC_16bit,4);
sprintf(txt,"0%06d",volt[0]);
LCD_P6x8Str(5,1,(uint8 *)txt); //LCD屏显示
sprintf(txt,"1%06d",volt[1]);
LCD_P6x8Str(5,2,(uint8 *)txt);
sprintf(txt,"4%06d",volt[4]);
LCD_P6x8Str(5,3,(uint8 *)txt);
sprintf(txt,"5%06d",volt[5]);
LCD_P6x8Str(5,4,(uint8 *)txt);
sprintf(txt,"2%06d",volt[2]);
LCD_P6x8Str(54,1,(uint8 *)txt);
sprintf(txt,"3%06d",volt[3]);
LCD_P6x8Str(54,2,(uint8 *)txt);
}
均值和终值滤波代码:
u16 ADC_Ave(ADCn_e adc_n,ADCn_Ch_e adc_ch,ADC_nbit bit,u16 N) //均值滤波
{
u32 tmp = 0;
u8 i;
for(i = 0; i < N; i++)
tmp += ADC_Mid(adc_n,adc_ch,bit);
tmp = tmp / N;
return (u16)tmp;
}
u16 ADC_Mid(ADCn_e adc_n,ADCn_Ch_e adc_ch,ADC_nbit bit) //中值滤波
{
u16 i,j,k,tmp;
//1.取3次A/D转换结果
i = ADC_Once(adc_n,adc_ch,bit);
j = ADC_Once(adc_n,adc_ch,bit);
k = ADC_Once(adc_n,adc_ch,bit);
//2.取中值
if (i > j)
{
tmp = i; i = j; j = tmp;
}
if (k > j)
tmp = j;
else if(k > i)
tmp = k;
else
tmp = i;
return tmp;
}
(2)编码器 实物图
") AB相增量式编码器原理:
AB相增量式编码器原理:
")
") 发光二极管发射的光通过光栅到达光敏管,引起电平变化。如果正转,A相输出超前B相90度,如果反转A相滞后B相90度。 AB相正交解码原理:
发光二极管发射的光通过光栅到达光敏管,引起电平变化。如果正转,A相输出超前B相90度,如果反转A相滞后B相90度。 AB相正交解码原理:
") CNT寄存器:寄存器通过正解解码的得到的脉冲值,最后只要读取CNT的值就可以得到编码器转数(正值为正转,负值为反转)。 CNTIT寄存器:CNT计数的初始值。 AB相的电平和跳变沿决定了CNT的加数和减数。 CNT增计数时: A上升沿,B逻辑低 B上升沿,A逻辑高 B下降沿,A逻辑低 A下降沿,B逻辑高 CNT减计数是: A下降沿,B逻辑低 B下降沿,A逻辑高 B上升沿,A逻辑低 A上升沿,B逻辑高 编码器数值的读取我们使用了k60芯片的FTM模块中的正交解码功能来实现,直接调用库中的正交解码函数就可以获得脉冲数,通过比例换算可以获得当前速度。
CNT寄存器:寄存器通过正解解码的得到的脉冲值,最后只要读取CNT的值就可以得到编码器转数(正值为正转,负值为反转)。 CNTIT寄存器:CNT计数的初始值。 AB相的电平和跳变沿决定了CNT的加数和减数。 CNT增计数时: A上升沿,B逻辑低 B上升沿,A逻辑高 B下降沿,A逻辑低 A下降沿,B逻辑高 CNT减计数是: A下降沿,B逻辑低 B下降沿,A逻辑高 B上升沿,A逻辑低 A上升沿,B逻辑高 编码器数值的读取我们使用了k60芯片的FTM模块中的正交解码功能来实现,直接调用库中的正交解码函数就可以获得脉冲数,通过比例换算可以获得当前速度。
SPEED=FTM_AB_Get(FTM1); //读取正交解码数值
获取FTM正交解码脉冲数的函数:
int16 FTM_AB_Get(FTMn_e ftmn)
{
uint32 val;
val = FTM_CNT_REG(FTMN[ftmn]);// 计数器,只有低16位可用(写任何值到此寄存器,都会加载 CNTIN 的值)
FTM_CNT_REG(FTMN[ftmn]) = 0;
return val;
}
(3).超声波 超声波模块的使用主要根据模块的测距原理编写,首先使Trig口输出不少于的10us的高电平信号,随后通过k60低功耗计时器(lptmr)计算Echo端高电平持续时间,即超声波从发送到接收的时间,最后用时间计算出距离。
void US_Init()
{
GPIO_Init(PORTA,27,1,0);
GPIO_Init(PORTA,29,0,0);
}
void Distance_Get()
{
i=0;
char txt[20]=' ';
GPIO_Ctrl(PORTA,27,1);
LPTMR_delay_us(20);
GPIO_Ctrl(PORTA,27,0);
while(GPIO_Get(PTA29)==0);
LPTMR_time_start_us();
while(GPIO_Get(PTA29)==1);
i = LPTMR_time_get_us();
if(i > 65535)
{
d=10000;
}
else
{
d=(int)(i*0.2);
}
sprintf(txt,"dis= %06dmm",d);
UART_Put_Str(UART4,txt); //串口输出
LCD_P6x8Str(28,7,(uint8 *)txt); //LCD输出
}
3、控制部分:舵机和电机 (1)PID代码 智能车的控制主要采用了经典的PID控制算法,分为电机速度控制和舵机方向控制。 舵机的控制是最重要的部分,是巡线的关键。通过ADC采集的三组电感的电压值来判断当前车身的状态,将当前值与期望值比较得到误差,代入增量式PID,调节出合适的参数,从而能够输出调整量使车能够始终巡线运行。 电机控制要求精度不高,只采用了PI控制,保证车速相对稳定,不至于产生太大波动,主要为了应对粗糙路面以及上下坡的情况。通过编码器传回的速度值判断当前车速,调整至稳定值。主要应用于上坡时,通过PID增大电机电流。 PID及其参数特点:
") 增量式PID介绍:
增量式PID介绍:
") 实现代码:
实现代码:
typedef struct //把PID定义为结构体形式
{
float Kp,Ki,Kd;
float Feedback;
float Target;
float error0,error1,error2;
float Output;
float Range; //控制输出范围,防止输出过大
}Type_PID;
void PID(Type_PID* PID)
{
PID->error0 = (PID->Target) - (PID->Feedback);
PID->Output = (PID->Kp)*(PID->error0)+PID->Kd*(PID->error0-2*PID->error1+PID->error2)+PID->Ki*(PID->error0+PID->error2);
//更新偏差
PID->error2 = PID->error1;
PID->error1 = PID->error0;
//对PID死区控制,因输出电流太小不足以驱动电机
if (abs(PID->Output) < 20)
PID->Output = 0;
PID->Output = limit(PID->Output, PID->Range, -PID->Range);//把output限制在+-range之内
}
(2)主函数中PID代码
//pid初始设置
pid=(Type_PID *)malloc(sizeof(Type_PID));
memset(pid,0,sizeof(Type_PID));
pid_speed=(Type_PID *)malloc(sizeof(Type_PID));
memset(pid_speed,0,sizeof(Type_PID));
//电机速度PID
pid_speed->Kp=1;
pid_speed->Ki=4;
pid_speed->Range=700;
//舵机转角PID
pid->Kp=1.5;
pid->Ki=0.7;
pid->Kd=7.5;
pid->Range=142;
4.显示部分 (1)串口与蓝牙 蓝牙模块用的是HC-05,可以与串口共用。 下面给出库中的串口发送字符串函数,不赘述。
//例子:uart_putchar (UART4, "123456789");实际发送9个字节
void UART_Put_Str (UARTn_e uratn, char *str) //参数: uratn:模块名如:UART0 ,str: 发送的地址
{
while(*str)
{
UART_Put_Char(uratn, *str++);
}
}
(2)LCD屏 列出库中函数,具体实现不赘述。
LCD_P6x8Str(unsigned char x,unsigned char y,unsigned char *p)// 写入一组标准ASCII字符串, 显示的位置(x,y),y为页范围0~7,要显示的字符串
void LCD_P14x16Str(unsigned char x,unsigned char y,unsigned char ch[]) //输出汉字字符串