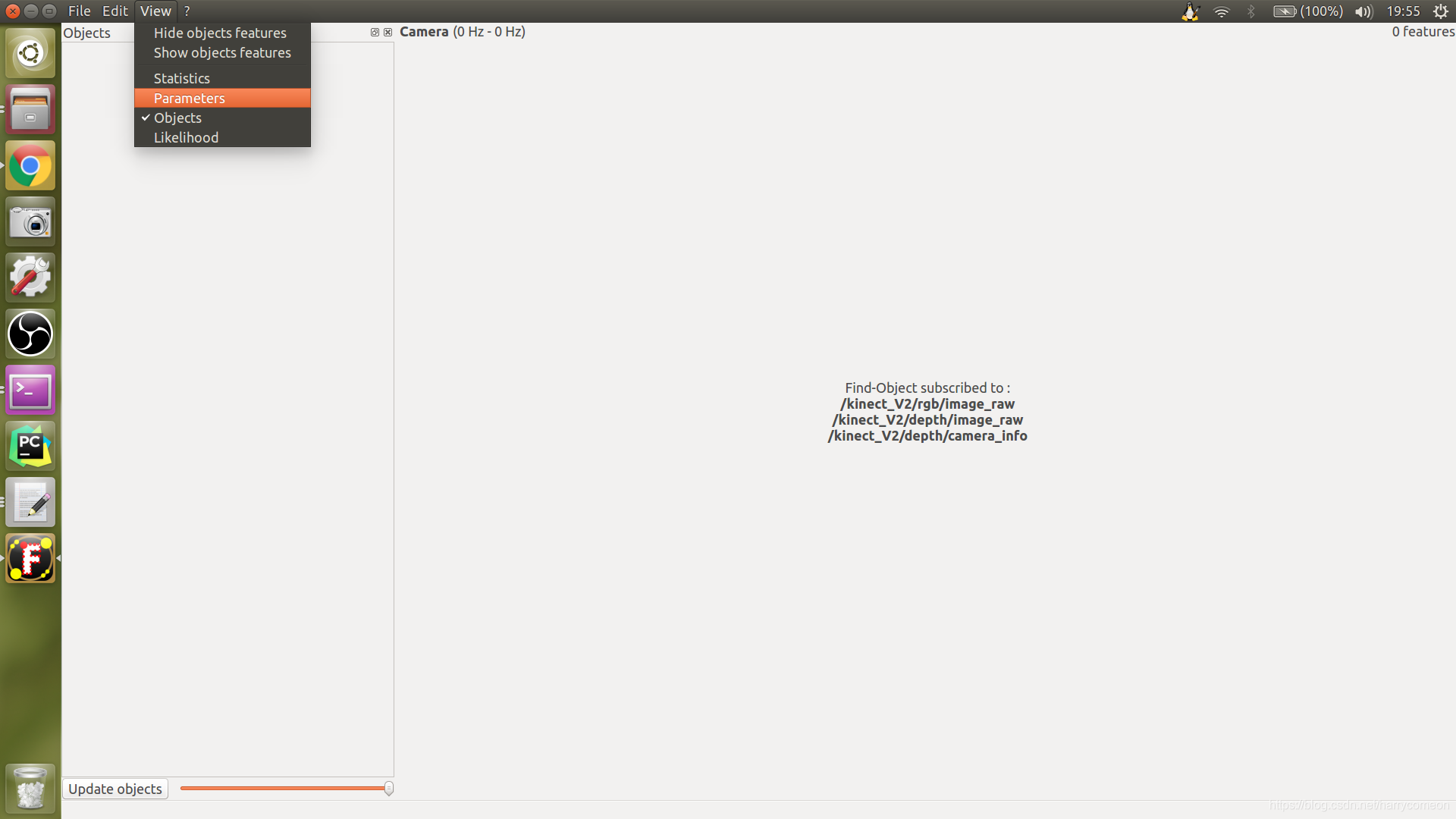
6,视觉算法 这里我以OpenCv中的SIFT描述子检测目标物体相对于相机的位姿。这里有个开源的包。find_object_2d是ROS平台下一个功能强大的识别物体的功能包。由于对于纯颜色物体具有很少的特征,所以我决定把另外两个物快设置成纯红色,只有一个物快设置成木质色用于目标抓取。 1,首先把之前平台搭建起的Kinect V2图像的RGB和深度图像作为输入进行包的重映射。 find_object_3d_kinect2.launch
<remap from="rgb/image_rect_color" to="/kinect_V2/rgb/image_raw"/>
<remap from="depth_registered/image_raw" to="/kinect_V2/depth/image_raw"/>
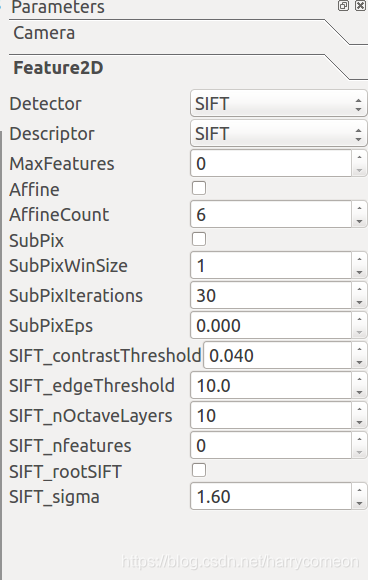
<remap from="depth_registered/camera_info" to="/kinect_V2/depth/camera_info"/> 2,然后需要设置SIFT参数
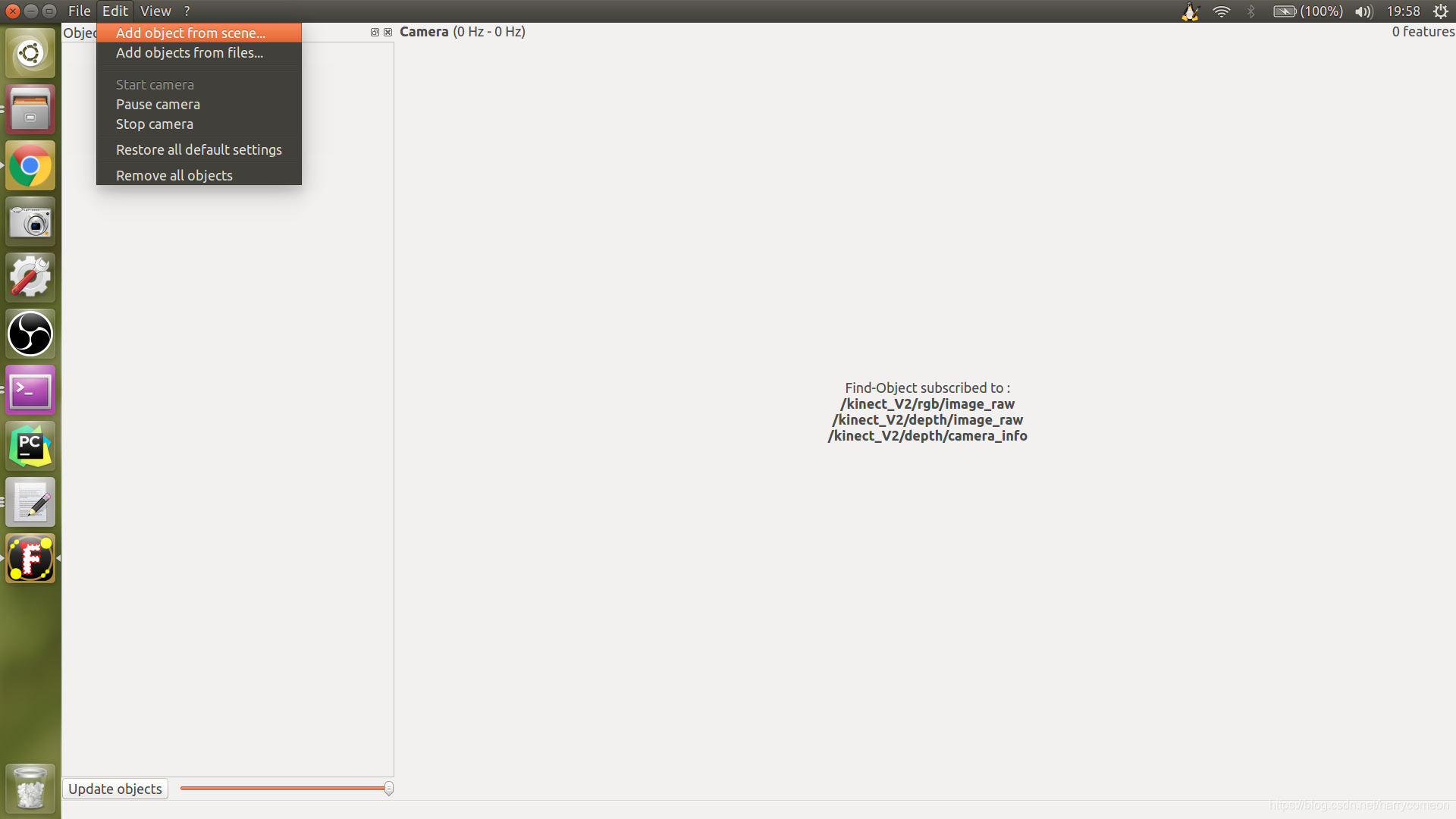
 3,截图选定目标物体区域
3,截图选定目标物体区域
 这块的设置步骤大致是这样,下一步就是结合之前的模拟环境进行视觉抓取 1,
这块的设置步骤大致是这样,下一步就是结合之前的模拟环境进行视觉抓取 1, roslaunch ur5_single_arm_tufts ur5_single_arm_gazebo.launch
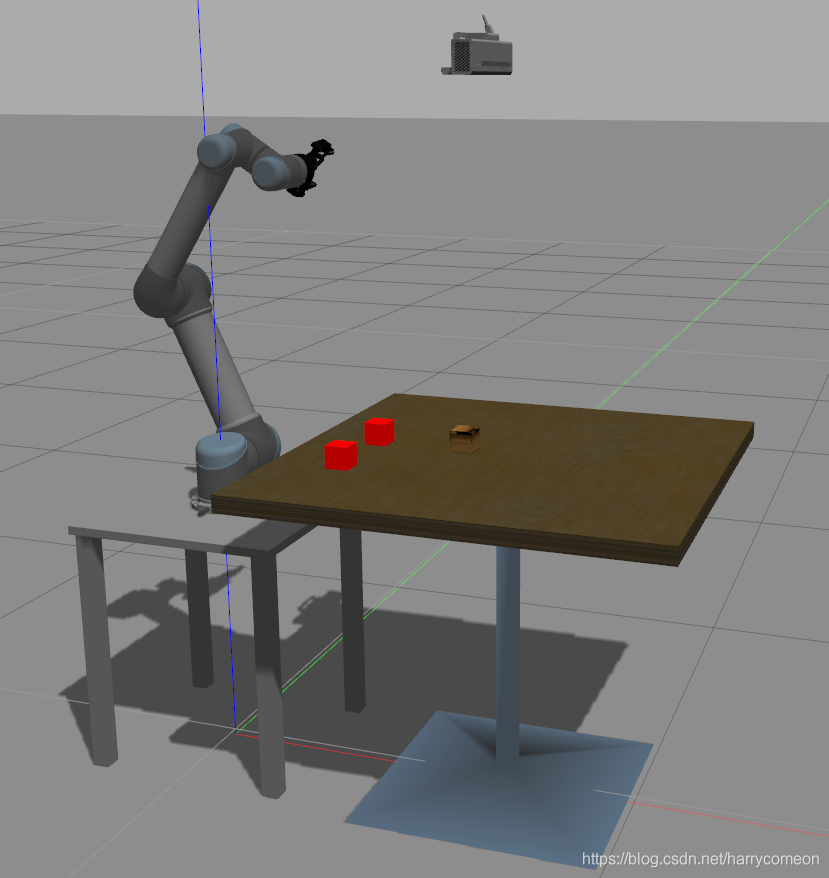 这里要强调一下,这里木色物快的位姿相对于机械臂基座标的位姿。 (0.6 0.0 0.181 0 0 0 ) 2,
这里要强调一下,这里木色物快的位姿相对于机械臂基座标的位姿。 (0.6 0.0 0.181 0 0 0 ) 2, roslaunch find_object_2d find_object_3d_kinect2.launch
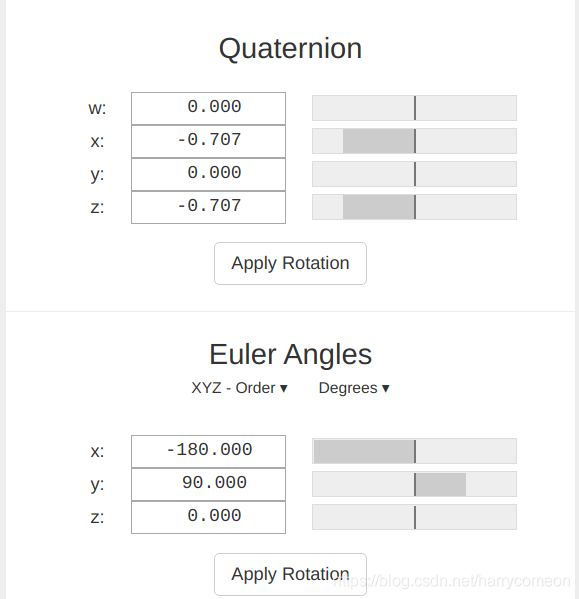
 启动RVIZ的TF树,可以查看发布的物体坐标,这里有个疑问在于发布的物体坐标在姿态上有变换
启动RVIZ的TF树,可以查看发布的物体坐标,这里有个疑问在于发布的物体坐标在姿态上有变换
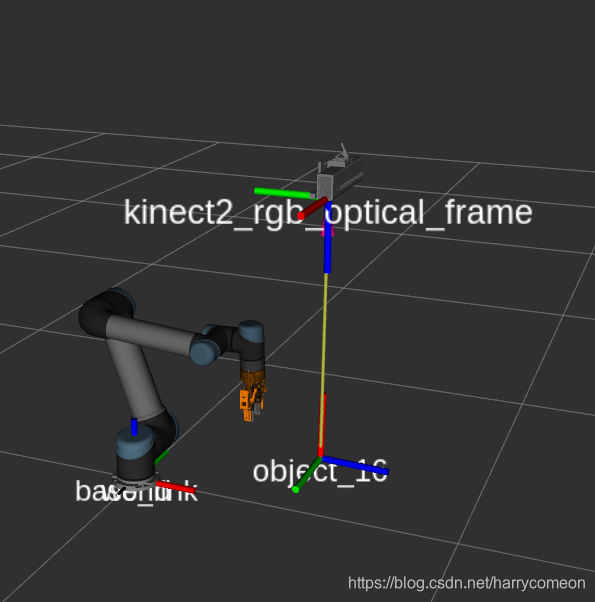
 我也没搞明白为什么,先留下一个疑问吧。 可以运行
我也没搞明白为什么,先留下一个疑问吧。 可以运行 rqt_tf_tree rqt_tf_tree
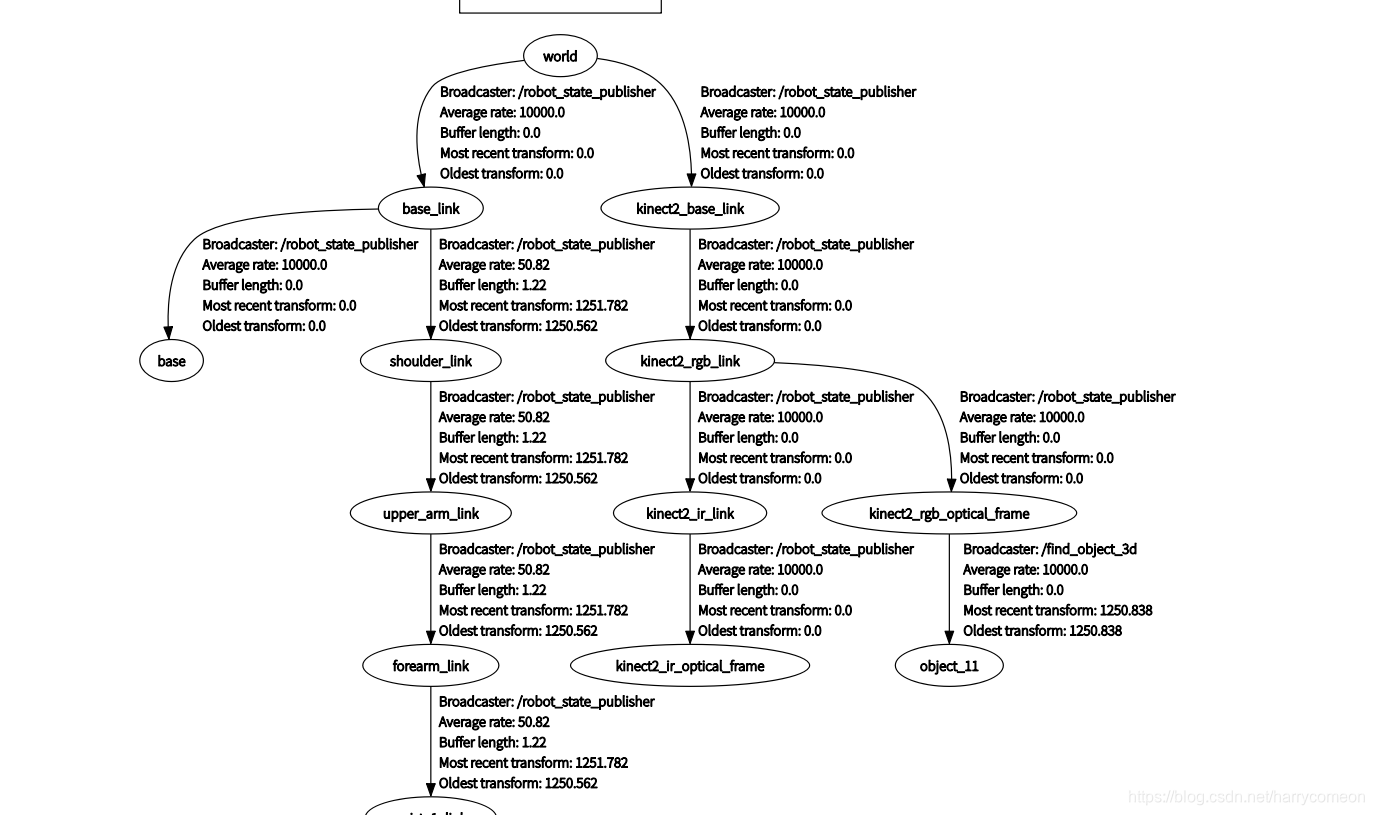 可以物体坐标是可以通过kinect v2的坐标转换到world(base_link)坐标下,我的模型两者的坐标系重合。 3,
可以物体坐标是可以通过kinect v2的坐标转换到world(base_link)坐标下,我的模型两者的坐标系重合。 3, rosrun opencv tf_listener.py
 这个函数主要是订阅tf树中的world和object的坐标变换,然后进行重新话题发布物体位到/objection_position_pose 话题下
这个函数主要是订阅tf树中的world和object的坐标变换,然后进行重新话题发布物体位到/objection_position_pose 话题下
 这里需要对比我们之前设定好的位姿法线,在位置上的误差并不是很大,但是姿态的变化还存在疑问。 (0.6 0.0 0.181) (0.5840022262580775, 0.057023499981076364, 0.18070173712197124) 4,
这里需要对比我们之前设定好的位姿法线,在位置上的误差并不是很大,但是姿态的变化还存在疑问。 (0.6 0.0 0.181) (0.5840022262580775, 0.057023499981076364, 0.18070173712197124) 4, rosrun ur5_single_arm_manipulation grasping_demo_vision2.py 主要是一套抓取路点结合,但是其中物体的位姿是订阅话题/objection_position_pose,主要通过一个callback回调函数进行了路点设定,部分程序如下
def callback(pose):
object_position_info = pose.position
object_orientation_info = pose.orientation
print object_position_info
moveit_commander.roscpp_initialize(sys.argv)
#rospy.init_node('move_group_grasp', anonymous=True)
#robot = moveit_commander.robot.RobotCommander()
arm_group = moveit_commander.move_group.MoveGroupCommander("manipulator")
hand_group = moveit_commander.move_group.MoveGroupCommander("gripper")
arm_group.set_named_target("home_j")
plan = arm_group.go()
print("Point 1")
# Open
#hand_group.set_joint_value_target([9.800441184282249e-05, -9.800441184282249e-05, 9.800441184282249e-05, 9.800441184282249e-05, -9.800441184282249e-05, 9.800441184282249e-05])
#hand_group.go(wait=True)
#print("Point 2")
hand_group.set_named_target("open")
plan = hand_group.go()
print("Point 2")
pose_target = arm_group.get_current_pose().pose
# Block point top
pose_target.position.x = object_position_info.x
pose_target.position.y = object_position_info.y
pose_target.position.z = object_position_info.z+0.25
实验效果:

 参考网址: 1,https://github.com/Dzy-HW-XD/kinectv2_ur5 2,https://github.com/ldahee/wecar/tree/1a6e5ebc7534f314410f1ee50a71c75df9a52c0b/find-object 3,http://introlab.github.io/find-object/ 4,http://wiki.ros.org/find_object_2d 7,手眼标定 手眼标定的目的是为了得到相机相对于机械臂基座标的坐标变换。 主要程序链接: https://github.com/harrycomeon/ur5-gazebo-visual-grasping/tree/master
参考网址: 1,https://github.com/Dzy-HW-XD/kinectv2_ur5 2,https://github.com/ldahee/wecar/tree/1a6e5ebc7534f314410f1ee50a71c75df9a52c0b/find-object 3,http://introlab.github.io/find-object/ 4,http://wiki.ros.org/find_object_2d 7,手眼标定 手眼标定的目的是为了得到相机相对于机械臂基座标的坐标变换。 主要程序链接: https://github.com/harrycomeon/ur5-gazebo-visual-grasping/tree/master



