1.运行小海龟仿真工具  打开新的终端输入 rqt_,然后摁两下回车键即可看到Ubuntu基于qt的可视化工具
打开新的终端输入 rqt_,然后摁两下回车键即可看到Ubuntu基于qt的可视化工具  1.ros_console 展示一些系统中默认的日志信息,比如让小海龟运动起来撞墙后会显示报警信息
1.ros_console 展示一些系统中默认的日志信息,比如让小海龟运动起来撞墙后会显示报警信息 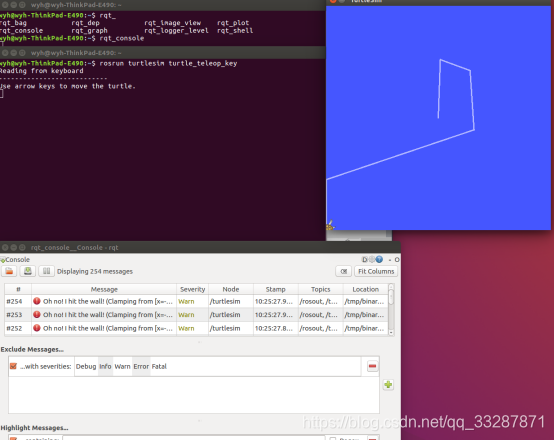 2.rqt_plot 绘制数据曲线 比如订阅小海龟的位置信息
2.rqt_plot 绘制数据曲线 比如订阅小海龟的位置信息 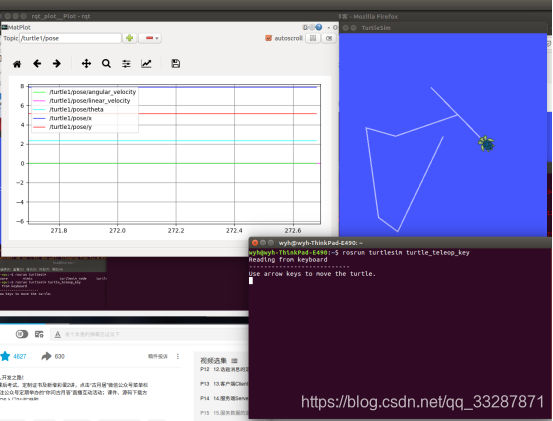 3.rqt_image_view 查看摄像头图像
3.rqt_image_view 查看摄像头图像  4.rqt 里面继承了ROS中所有的可视化工具,是一个自动性的工具
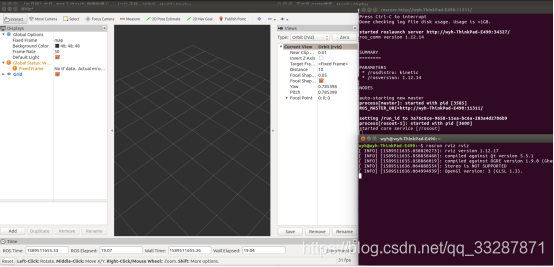
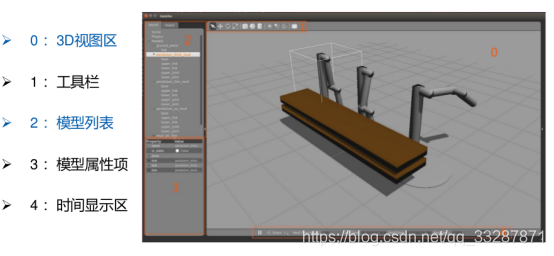
4.rqt 里面继承了ROS中所有的可视化工具,是一个自动性的工具  5.Rviz Rviz 是一款三维可视化工具,可以很好的兼容基于ROS软件框架的机器人平台。 ➢ 在rviz中,可以使用可扩展标记语言XML对机器人、周围物体等任何实物进行尺寸、质量、位 置、材质、关节等属性的描述,并且在界面中呈现出来。 ➢ 同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围 环境的变化等信息。 ➢ 总而言之,rviz通过机器人模型参数、机器人发布的传感信息等数据,为用户进行所有可监测信 息的图形化显示。用户和开发者也可以在rviz的控制界面下,通过按钮、滑动条、数值等方式, 控制机器人的行为。
5.Rviz Rviz 是一款三维可视化工具,可以很好的兼容基于ROS软件框架的机器人平台。 ➢ 在rviz中,可以使用可扩展标记语言XML对机器人、周围物体等任何实物进行尺寸、质量、位 置、材质、关节等属性的描述,并且在界面中呈现出来。 ➢ 同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围 环境的变化等信息。 ➢ 总而言之,rviz通过机器人模型参数、机器人发布的传感信息等数据,为用户进行所有可监测信 息的图形化显示。用户和开发者也可以在rviz的控制界面下,通过按钮、滑动条、数值等方式, 控制机器人的行为。 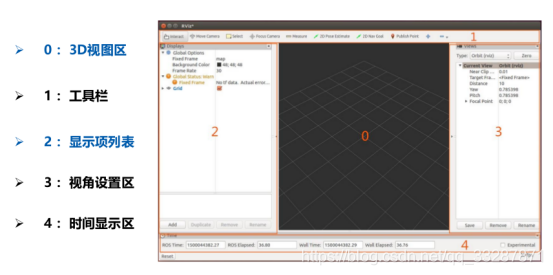
 6.Gazebo
6.Gazebo 
ROS-常用可视化工具的使用




- Java 16最前沿技术——ZGC
- 2016年机器人发展五大趋势
- ROS探索总结(一)——ROS简介
- ROS探索总结(二)——ROS总体框架
- ROS探索总结(三)——ROS新手教程
- ROS探索总结(四)——简单的机器人仿真
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS探索总结(六)——使用smartcar进行仿真
- ROS探索总结(七)—— smartcar源码上传
- ROS探索总结(八)—— 键盘控制
- ROS探索总结(九)—— 操作杆控制
- ROS探索总结(十)—— 语音控制
- ROS探索总结(十一)—— 机器视觉
- ROS探索总结(十二)—— 坐标系统
- ROS探索总结(十三)—— 导航与定位框架
- ROS探索总结(十四)—— move_base(路径规划)