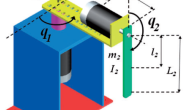
一、刚体的惯性张量 在单自由度系统中,常常要考虑刚体的质量。对于定轴转动的情况,经常用到惯量矩这个概念。对一个可以在三维空间自由运动的刚体来说,可能存在无穷个旋转轴。在一个刚体绕任意轴做旋转运动时,我们需要一种能够表征刚体质量分布的方法。在这里,我们需要引入惯性张量,它可以被看做是对一个物体惯量的广义度量。 现在我们定义一组参量,给出刚体质量在参考坐标系中分布的信息。下图表示一个刚体,坐标系建立在刚体上。惯性张量可以在任何坐标系中定义,但一般在固连于刚体上的坐标系中定义惯性张量。 坐标系{A}中的惯性张量可用3*3矩阵表示如下:  矩阵中各元素为:
矩阵中各元素为:  式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量
式中刚体由单元体dv组成,单元体密度为ρ,每个单元体的位置由矢量![]() 二、惯性张量的物理意义 当刚体绕定点转动时,刚体的动量矩为:
二、惯性张量的物理意义 当刚体绕定点转动时,刚体的动量矩为:  将上式展开写成矩阵的形式是:
将上式展开写成矩阵的形式是:  右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。 参考文献: John Craig 《机器人学导论》 机械工业出版社 2006 洪国维 《惯性张量的物理意义》
右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。L i表示刚体绕定点旋转时对每个分坐标轴的动量矩。 参考文献: John Craig 《机器人学导论》 机械工业出版社 2006 洪国维 《惯性张量的物理意义》
【机器人学】刚体的惯性张量及其物理意义


- 机器人动力学仿真 – 变量更新顺序不同所产生的结果分析
- Java 16最前沿技术——ZGC
- 2016年机器人发展五大趋势
- ROS探索总结(一)——ROS简介
- ROS探索总结(二)——ROS总体框架
- ROS探索总结(三)——ROS新手教程
- ROS探索总结(四)——简单的机器人仿真
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS探索总结(六)——使用smartcar进行仿真
- ROS探索总结(七)—— smartcar源码上传
- ROS探索总结(八)—— 键盘控制
- ROS探索总结(九)—— 操作杆控制
- ROS探索总结(十)—— 语音控制
- ROS探索总结(十一)—— 机器视觉
- ROS探索总结(十二)—— 坐标系统
- ROS探索总结(十三)—— 导航与定位框架